title: PAT
date: 2020-01-06 07:26:48
tags:
Morning Reading
- 数据结构(45)
- 计算机组成原理(45)
- 计算机网络(25)
- 计算机操作系统(35)
Data Structure
大纲
[考查目标]
1。掌握数据结构的基本概念、基本原理和基本方法。
2。掌握数据的逻辑结构、存储结构及基本操作的实现,能够对算法进行基本的时间复
杂度与空间复杂度的分析。
3。能够运用数据结构基本原理和方法进行问题的分析与求解,具备采用 C 或 C++语言
设计与实现算法的能力。
一、线性表
(一)线性表的定义和基本操作
(二)线性表的实现
1。顺序存储
2。链式存储
3。线性表的应用
二、栈、队列和数组
(一)栈和队列的基本概念
(二)栈和队列的顺序存储结构
(三)栈和队列的链式存储结构
(四)栈和队列的应用
(五)特殊矩阵的压缩存储
三、树与二叉树
(一)树的基本概念
(二)二叉树
1。二叉树的定义及其主要特征
2。二叉树的顺序存储结构和链式存储结构
3。二叉树的遍历
4。线索二叉树的基本概念和构造
(三)树、森林
1。树的存储结构
2。森林与二叉树的转换
3。树和森林的遍历
(四)树与二叉树的应用
1。二叉排序树
2。平衡二叉树
3。哈夫曼(Huffman)树和哈夫曼编码
四、图
(一)图的基本概念
(二)图的存储及基本操作
1。邻接矩阵法
2。邻接表法
3。邻接多重表、十字链表
(三)图的遍历
1。深度优先搜索
2。广度优先搜索
(四)图的基本应用
1。最小(代价)生成树
2。最短路径
3。拓扑排序
4。关键路径
五、查找
(一)查找的基本概念
(二)顺序查找法
(三)分块查找法
(四)折半查找法
(五)B 树及其基本操作、B+树的基本概念
(六)散列(Hash)表
(七)字符串模式匹配
(八)查找算法的分析及应用
六、排序
(一)排序的基本概念
(二)插入排序
1。直接插入排序
2。折半插入排序
(三)气泡排序(bubble sort)
(四)简单选择排序
(五)希尔排序(shell sort)
(六)快速排序
(七)堆排序
(八)二路归并排序(merge sort)
(九)基数排序
(十)外部排序
(十一)各种内部排序算法的比较
(十二)排序算法的应用
Introduction
graph LR
A(绪论) --- B(数据结构)
B --- B1(逻辑结构)
B --- B2("存储结构(物理结构)")
B --- B3(数据的运算)
B1 --- B11("线性结构: 线性表, 栈, 队列")
B1 --- B12("非线性结构: 树, 图, 集合")
A --- C(五个特征)
C --- C1(算法定义)
C --- C2("五个特性: 有穷, 确定, 可行, 输出, 输出")
C --- C3(效率的度量)
C3 --- C11(时间复杂度)
C3 --- C12(空间复杂度)
基本概念和术语
数据, 数据元素, 数据对象, 数据类型, 抽象数据类型, 数据结构
抽象数据类型(ADT): 指一个数据模型及定义在该模型上的一组操作; 其定义仅取决于它的一组逻辑特性; 常用(数据对象, 数据关系, 基本操作集)表示
数据结构是相互之间存在一种或多种特定关系的数据元素的集合。包含三方面内容(逻辑结构, 存储结构和数据运算)
算法和算法评价
时间复杂度
算法中所有语句的频度之和记为 T(n), 时间复杂度主要分析 T(n)的数量级。
常用算法中基本运算的频度 f(n)来分析算法的时间复杂度. 记为 T(n) = O(f(n))
常见的渐近时间复杂度为:
O(1) < O($log{2}n$) < O(n) < O($nlog{2}n$) < O($n^2$) < O($n^3$) < O($2^n$) < O($n!$) < O($n^n$)
空间复杂度
Linear List
graph LR
A(线性表) --- B(顺序存储)
B --- B1(顺序表)
A(线性表) --- C(链式存储)
C --- C1(单链表)
C1 --- C5(指针实现)
C --- C2(双链表)
C2 --- C5
C --- C3(循环链表)
C3 --- C5(指针实现)
C --- C4("静态链表(借助数组实现)")
顺序存储
- 线性表中的位序从1开始,数组中的元素的下标是从0开始的
- 主要特点: 随机访问,即通过首地址和元素序号可在时间O(1)内找到指定元素。
- 存储密度高,每个节点只存储输出元素
- O(n) 插入,删除,顺序查找
链式存储
链表,无论单链表,双链表还是循环链表,一定要保证不断链。
单链表
定义
typedef struct LNode{
ElemType data;
struct LNode *next;
}LNode, *LinkList
```
不管带不带头结点,头指针始终指向链表的第一个结点
头结点是带头结点的链表中的第一个结点,结点内通常不存储信息。(加入头结点,空表和非空表的处理得到统一)
O(n)
- 头插法建立单链表
- 尾插发建立单链表
- 按序号查找结点值
- 按值查找表结点
- 插入结点操作
- 删除结点操作
- 求表长操作
双链表
循环单链表
静态链表
借助数组来描述线性表的链式存储结构,这里的指针是结点的相对地址(数组下标),又称游标。
如何选取存储结构
Stack and Queue
复习提示
- 本章通常以选择题的形式考查,题目不算难,但命题形式灵活,也容易出现在算法设计题中。
- 其中栈(出入栈的过程、出栈序列的合法性) 和 队列的操作及其特征是重点。
- 此外,栈和队列的顺序存储结构、链式存储结构及其特点、双端队列的特点、栈和队列的常见应用,以及数组和特殊矩阵的压缩存储都是读者必须掌握的内容。
graph LR
A(线性表)-- 操作受限 ---B1(栈)
B1 --- B11(顺序栈)
B1 --- B12(链栈)
B1 --- B13(共享栈)
A(线性表)-- 操作受限 ---B2(队列)
B2 --- B21(循环队列)
B2 --- B22(链式队列)
B2 --- B23(双端队列)
A-- 推广 ---C(数组)
C --- C1(一维数组)
C --- C2("多维数组: 压缩存储, 稀疏矩阵")
栈
栈(Stack) 只允许在一端进行插入或删除操作的线性表。
队列
队列(Queue) 只允许在表的一端进行插入,而在表的另一端进行删除
队列的顺序存储
#define MaxSize 50
typedef struct{
ElemType data[MaxSize];
int front, rear;
} SqQueue;
存在 假溢出 的现象
循环队列
初始时: Q.font=Q.rear=0
队首指针进1: Q.front=(Q.front+1)%MaxSize
队尾指针进1: Q.rear=(Q.rear+1)%MaxSize
队列长度: (Q.rear+MaxSize-Q.front)%MaxSize
区分队满还是队空,三种处理方式:
(普遍)牺牲一个存储单元来区分队空和队满,即队头指针在队尾指针的下一位置作为队满的标志
队满条件: (Q.rear+1)%MaxSize==Q.front
队空条件: Q.front==Q.rear
类型中增设表示元素个数的数据成员
队空条件: Q.size==0
队满条件: Q.size==MaxSize
队满队空都有Q.front==Q.rear
类型中增设tag数据成员,以区分是队满还是队空。
- tag等于0时,若因删除导致Q.front==Q.rear,则为队空。
- tag等于1时,若因插入导致Q.front==Q.rear, 则为队满。
队列的链式存储
typedef struct{
ElemType data;
struct LinkNode *next;
} LinkNode;
typedef struct{
LinkNode *front, *rear;
} LinkQueue;
- 当Q.front==NULL 且Q.rear==NULL时, 链式队列为空
- 用单链表表示的链式队列特别适合于数据元素变动比较大的情形,而且不存在队列满且产生溢出的问题。
双端队列
输出受限的双端队列,输入受限的双端队列
- 能由输入受限的双端队列得到,但不能由输出受限的双端队列得到的输出序列。4132
- 能由输出受限的双端队列得到,但不能有输入受限的双端队列得到的输出序列。4213
- 既不能由输入受限的双端队列得到,又不能由输出受限的双端队列得到的输出序列。4231
栈和队列的应用
- 栈在括号匹配中的应用
- 栈在表达式求值中的应用
- 栈在递归中的应用
- 队列在层次遍历中的应用
- 队列在计算机系统中的应用
特殊矩阵的压缩存储
即最小空间存储矩阵,矩阵在计算机图形学,工程计算中占有举足轻重的地位。数据结构考虑的是如何用最小的内存空间来存储同样一组数据,并能方便地提取矩阵中的元素。
数组一旦被定义,其维数和维界就不再改变。
- 数组的存储结构
- 一个数组的所有元素在内存中占用一段连续的存储空间。
- 矩阵的压缩存储
- 稀疏矩阵
总结
在考研真题中,链式栈出现的概率要比顺序栈低得多。
Tree and Binary Tree
复习提示
- 本章多以选择题的形式考查,但也会涉及树遍历相关的算法题
- 树和二叉树的性质、遍历操作、转换、存储结构和操作特性等
- 满二叉树、完全二叉树,线索二叉树、哈夫曼树的定义和性质
- 二叉排序树和二叉平衡树的性质和操作等,都是选择题必然会涉及的内容
graph LR
A(树形结构) --- B(二叉树)
B --- B1("概念: 定义, 存储结构")
B --- B2("操作")
B --- B3("应用")
B2 --- B21("三种遍历")
B2 --- B22("线索二叉树")
B3 --- B31("排序二叉树 ---- 平衡二叉树")
B3 --- B32(哈夫曼树)
A(树形结构) --- C(树和森林)
C --- C1("概念: 定义, 存储结构")
C --- C2(操作)
C2 --- C21(与二叉树的转换)
C2 --- C22(遍历)
C --- C3("应用: 并查集")
树具有如下最基本的性质:
- 树种的结点树等于所有结点的度数加 1。
- 度为 m 的树种第 i 层上至多有 $m^{i-1}$ 个结点。(i $\ge$ 1)
- 高度为 h 的 m 叉树至多有 $(m^h-1)/(m-1)$ 个结点
- 具有 n 个结点的 m 叉树的最小高度为 $\lceil log_m{(n(m-1)+1)} \rceil$
树结点与度之间的关系有:
- 总结点数 = $n_0+n_1+n_2+…+n_m$
- 总分支数 = $1n_1+2n_2+…+mn_m$
- 总结点数 = 总分支数 + 1
二叉树
二叉树的遍历
按照某条搜索路径访问树中的每个结点,使得每个结点均被访问一次,而且仅被访问一次。
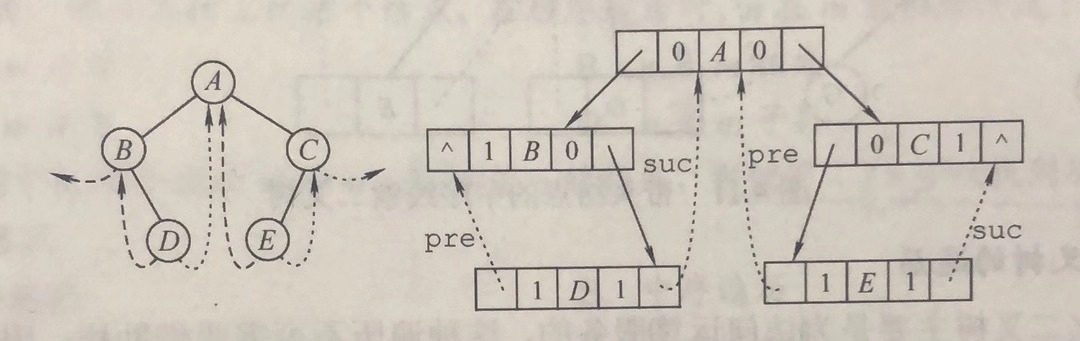
线索二叉树
线索,指向前驱或后继的指针。
typedef struct ThreadNode {
ElemType data;
struct ThreadNode *lchild, *rchild; // 左右孩子指针
int ltag, rtag;
} ThreadNode, *ThreadTree;
线索二叉树的构造
void InThread(ThreadTree &p, ThreadTree &pre) {
// 中序遍历对二叉树线索化的递归算法
if (p != NULL) {
InThread(p->lchild, pre);
if (p->lchild == NULL) {
p->lchild = pre;
p->ltag = 1;
}
if (pre != NULL && pre->rchild==NULL) {
pre->rchild = p;
pre->rtag = 1;
}
pre = p;
InThread(p->rchild, pre);
}
}
void CreateInThread(ThreadTree T) {
ThreadTree pre=NULL;
if (T != NULL) {
InThread(T, pre);
pre->rchild=NULL;
pre->rtag=1;
}
}
树,森林
存储结构
双亲表示法
#define MAX_TREE_SIZE 100
typedef struct {
ElemType data;
int parent;
} PTNode;
typedef struct {
PTNode nodes[MAX_TREE_SIZE];
int n;
}PTree;
孩子表示法
孩子兄弟表示法, 又称二叉树表示法
typedef struct CSNode {
ElemType data;
struct CSNode *firstchild, *nextsibling;
} CSNode, *CSTree
树,森林和二叉树的转换
树和森林的遍历
树的应用 —— 并查集
树和二叉树的应用
总结
- 本章的内容较多,其中二叉树是极其重要的考点。
- 遍历是二叉树的各种操作的基础,统考时会考察遍历过程中对结点的各种其他操作,而且容易结合递归算法和利用栈或队列的非递归算法。
- 读者需重点掌握各种遍历方法的代码书写,并学会在遍历的基础上,进行一些其他的相关操作。
- 其中递归算法短小精悍,出现的概率较大,请读者不要掉以轻心,要做到对几种遍历方式的程序模板烂熟于心,并结合一定数量的习题,才可以在考试中快速地写出漂亮的代码。
Graph
图$G$由顶点集$V$和边集$E$组成,记为$G=(V,E)$。有向图$: v为弧尾,w为弧头$。无向图$(v, w)$
复习提示
- 图算法的难度较大,因此主要掌握深度优先搜索与广度优先搜索,其他内容以算法题形式出现的概率不高。
- 应掌握
- 图的基本概念及基本性质、
- 图的存储结构(邻接矩阵、邻接表、邻接多重表和十字链表)及其特性
- 存储结构之间的转化
- 基于存储结构上的遍历操作和各种应用(拓扑排序、最小生成树、最短路径和关键路径)
- 图的相关算法较多、易混,但通常只要求掌握其基本思想和实现步骤(能手动模拟),而算法的具体实现则不是重点
graph LR
A(图) --- B(图的定义)
A(图) --- C(图结构的存储)
C --- C1("邻接矩阵法, 邻接表法")
C --- C2("邻接多重表法, 十字链表")
A(图) --- D(图的遍历)
D --- D1(深度优先遍历)
D --- D2(广度优先遍历)
A(图) --- E(图的相关应用)
E --- E1("最小生成树: Prim算法, Kruskal算法")
E --- E2("最短路径: Dijkstr算法, Floyd算法")
E --- E3("拓扑排序: AOV网")
E --- E4("关键路径: AOE网")
定义
图的存储及基本操作
临接矩阵法,指用一个一维数组存储图中顶点信息,用一个二维数组存储图中边的信息(即各顶点之间的临接关系),存储顶点之间临接关系的二维数组称为邻接矩阵。
#define MaxVertexNum 100 // 图顶点数目的最大值
typedef char VertexType; // 顶点的数据类型
typedef int EdgeType; // 带权图中边上权值的数据类型
typedef struct {
VertexType Vex[MaxVertexNum]; // 顶点表
EdgeType Edge[MaxVertexNum][MaxVertexNum]; // 邻接矩阵,边表
int vexnum, arcnum; // 图的当前顶点数和弧数
} MGraph;
- 邻接矩阵表示法的空间复杂度为$O(n^2)$,其中 n 为图的顶点数$\vert V \vert$
- 1 为存在边,0 为不存在边
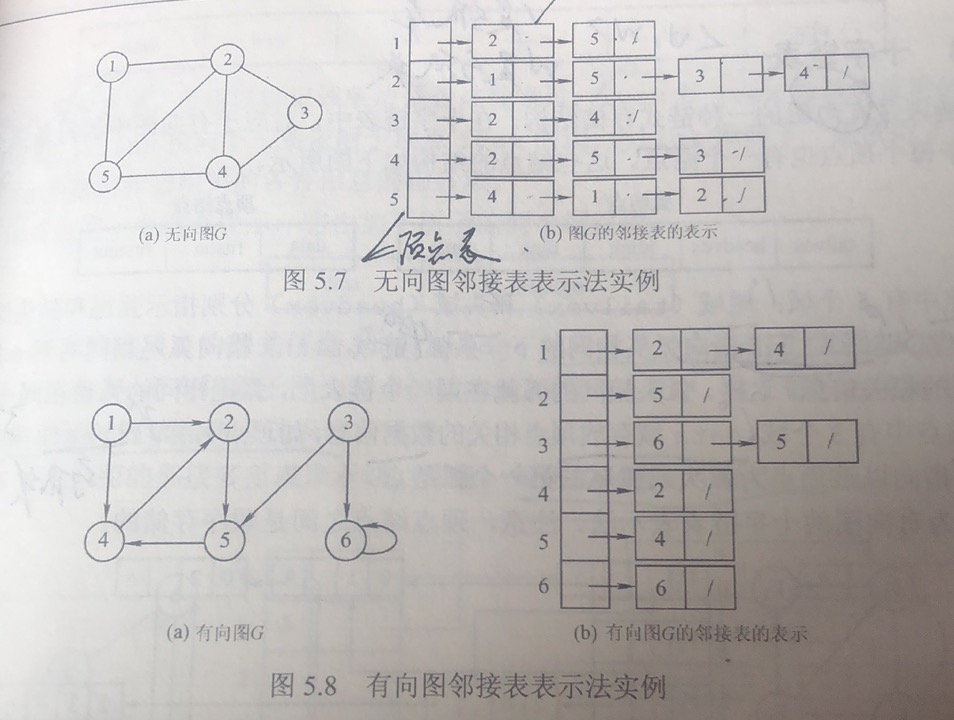
邻接表法,是对图$G$中的每个顶点$v_i$建立一个单链表,这个单链表称为边表。边表的头指针和顶点的数据信息采用顺序存储(称为顶点表)。
#define MaxVertexNum 100 // 图中顶点数目的最大值
typedef struct ArcNode { // 边表结点
int adjvex; // 该弧所指向的顶点的位置
struct ArcNode *next; // 指向下一条弧的指针
// InfoType info; // 网的边权值
}ArcNode;
typedef struct VNode { // 顶点表结点
VertexType data; // 顶点信息
ArcNode *first; // 指向第一条依附该顶点的弧的指针
}VNode, AdjList[MaxVertexNum];
typedef struct {
AdjList vertices; // 邻接表
int vexnum, arcnum; // 图的顶点数和弧数
} ALGraph; // ALGraph是以邻接表存储的图类型
- 顶点表结点 [ 顶点域(data),边表头指针(firstarc) ],边表结点 [ 邻接点域(adjvex),指针域(nextarc)]
十字链表,是有向图的一种链式存储结构
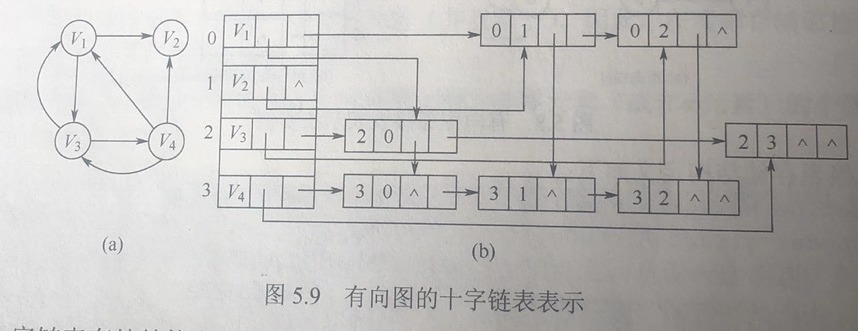
#define MaxVertexNum 100 // 图中顶点数目的最大值
typedef struct ArcNode { // 边表结点
int tailvex, headvex; // 该弧的头尾结点
struct AcrNode *hlink, *tlink; // 分别指向弧头相同和弧尾相同的结点
// InfoType info; // 相关信息指针
} ArcNode;
typedef struct VNode { // 顶点表结点
VertexType data; // 顶点信息
ArcNode *firstin, *firstout; // 指向第一条入弧和出弧
} VNode;
typedef struct {
VNode xlist[MaxVertexNum]; // 邻接表
int vexnum, arcnum; // 图的顶点数和弧数
} GLGraph; // GLGraph 是以十字邻接存储的图类型
- 顶点结点 [data,firstin,firstout]
- 弧结点 [tailvex,headvex,hlink,tlink,info]
邻接多重表,是无向图的另一种链式存储结构。
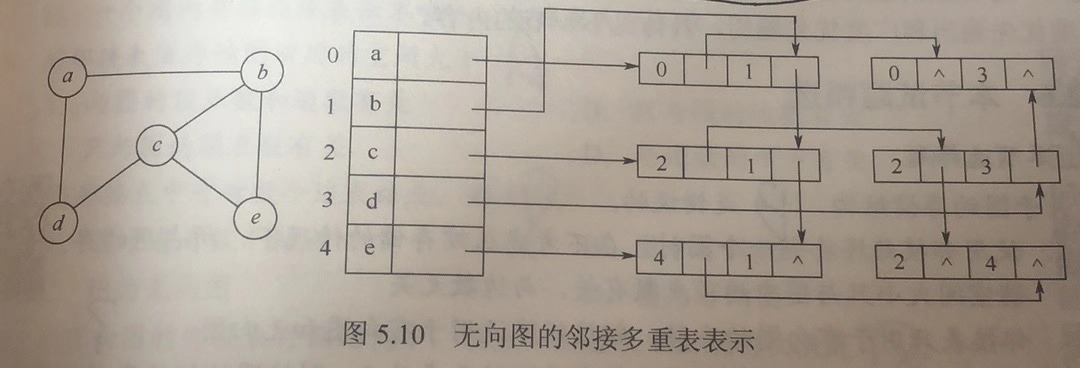
#define MaxVertexNum 100 // 图中顶点数目的最大值
typedef struct ArcNode { // 边结点
bool mark; // 访问标记
int ivex, jvex; // 分别指向该弧的两个结点
struct ArcNode *ilink, *jlink; // 分别指向两个顶点的下一条边
// InfoType info; // 相关信息指针
} ArcNode;
typedef struct VNode {
VertexType data; // 顶点表结点
ArcNode *firstedge;
} VNode;
typedef struct {
VNode adjmulist[MaxVertexNum];
int vexnum, arcnum;
} AMLGraph;
- 顶点结点 [data,firstedge]
- 边结点 [mark,ivex,ilink,jvex,jlink,info]
图的基本操作
- Adjacent(G, x, y)
- Neighbors(G, x)
- InsertVertex(G, x)
- DeleteVertex(G, x)
- AddEdge(G, x, y)
- RemoveEdge(G, x, y)
- FirstNeighbor(G, x): 存在,返回顶点号,不存在,返回 -1.
- NextNeighbor(G, x, y): 存在,返回顶点号,不存在,返回 -1.
- Get_edge_value(G, x, y)
- Set_edge_value(G, x, y, v)
图的遍历
- Intro
- 图的遍历是指从图中的某一顶点出发,按照某种搜索方法沿着图中的边对图中的所有顶点访问一次且仅访问一次。
- 树是一种特殊的图。
- 几乎所有图的搜索算法,都可以抽象为优先级搜索或最佳优先搜索。
对于同样一个图,基于邻接矩阵存储的遍历所得到的DFS序列和BFS序列是唯一的,基于邻接表的遍历所得到的DFS和BFS序列是不唯一的。
广度优先搜索,(Breadth-First-Search, BFS)
info
- 会优先考虑最早被发现的顶点,也就是离起点越近的顶点其优先级越高。
- 类似于二叉树的层序遍历算法,借助队列。
- Dijkstra 单源最短路径算法和 Prim最小生成树算法也应用了类似的思想。
- 图的广度优先遍历还可用于求一些问题的最优解,但初试方面很难涉及。
- 邻接表存储$O(\vert V \vert+\vert E \vert)$;邻接矩阵存储$O(\vert V \vert^2)$。
- 在广度遍历的过程中,我们可以得到一颗遍历树,称为广度优先生成树。
广度优先所有算法的伪代码如下:
bool visited[MAX_VERTEX_NUM];
void BFSTraverse(Graph G) {
// 对图G进行广度优先遍历,设访问函数为visit()
for (i=0; i<G.vexnum; ++i)
visited[i] = false; // 访问标记数组初始化
InitQueue(Q); // 初始化辅助队列Q
for (i=0; i<G.vexnum; ++i) // 从 0 号顶点开始遍历
if (!visited[i]) // 对每个连通分量调用一次BFS
BFS(G, i); // Vi未访问过,从Vi开始BFS
}
void BFS(Graph G, int v) {
visit(v); // 访问初始顶点v
visited[v] = true; // 对v做已访问标记
Enqueue(Q, v); // 顶点 v 入队列
while(!isEmpty(Q)) {
DeQueue(Q, v); // 顶点 v 出队列
for (w=FirstNeighbor(G, v); w>=0; w=NextNeighbor(G, v, w)
// 检测 v 所有邻接点
if (!visited[w]) { // w 为 v 的尚未访问的邻接顶点
visit(w); // 访问顶点 w
visited[w] = true; // 对w做已访问标记
EnQueue(Q, w);
} //if
} // while
}
BFS算法求解单源最短路径问题(最少边数,非带权)
void BFS_MIN_Distance(Graph G, int u) {
//d[i]表示从 u 到 i 结点的最短路径
for (i=0; i<G.vexnum; ++i)
d[i] = ∞; // 初始化路径长度
visited[u] = true; d[u] = 0;
EnQueue(Q, u);
while(!isEmpty(Q)) { // BFS算法主过程
DeQueue(Q, u); // 队头元素出队
for (w=FirstNeighbor(G, u); w>=0; w=NextNeighbor(G, u, w))
if (!visited[w]) { // w为u的尚未访问的邻接顶点
visited[w] = true; // 设已访问标记
d[w] = d[u] + 1; // 路径长度加1
EnQueue(Q, w); // 顶点w入队
} // if
} //while
}
图的应用
本节是历年考查重点。图的应用主要包括: 最小生成(代价)树,最短路径,拓扑排序和关键路径。一般,直接以算法设计题形式考查的可能性很小,而更多的是结合图的实例来考查算法的具体执行过程,读者必须学会手工模拟给定图的各个算法的执行过程。此外,还需掌握对给定模型建立相应的图去解决问题的方法。
Searching
复习提示
本章是考研命题的终点
- 对应散列查找,应掌握散列表的构造、冲突处理方法(各种方法的处理过程)、查找成功和查找失败的平均查找长度、散列查找的特征和性能分析。
- 对于折半查找,应掌握折半查找的过程、构造判定树、分析查找成功和查找失败的平均查找长度等
- B树和B+ 树是本章的难点,对于B树,考纲要求掌握插入、删除和查找的操作过程,不要求掌握算法;对于B+ 树,仅要求了解其基本概念和性质。
- 串部分需要重点掌握next数组的构造方法。
graph LR
A(查找) --- B("基本概念: 静态查找, 动态查找")
A --- C(线性结构)
C --- C1(顺序查找)
C --- C2(折半查找)
C --- C3(分块查找)
A --- D(树形结构)
D --- D1(二叉排序树)
D --- D2(二叉平衡树)
D --- D3(B树, B+树)
A --- E("散列结构 ---- 散列表")
E --- E1(性能分析)
E --- E2(冲突处理)
A --- F("效率指标 --- 平均查找长度")
F --- F1(查找成功)
F --- F2(查找失败)
基本概念
- 查找,查找表,
- 静态查找:顺序查找,折半查找,散列查找等
- 动态查找:二叉排序树的查找,散列查找。(二叉平衡树和B树都是二叉排序树的改进)
- 关键字,平均查找长度(ASL,衡量查找算法效率的最主要的指标)
顺序查找
又称线性查找,主要用于在线性表中进行查找。
折半查找
又称二分查找,仅适用于有序的顺序表。
算法
int Binary_Search(SeqList L, ElemType key) {
int low=0, high=L.Tablelen-1, mid;
while (low<=high) {
mid=(low+high)/2;
if (L.elem[mid] == key)
return mid;
else if (L.elem[mid] > key)
high=mid-1;
else
low=mid+1;
}
return -1;
}
- $ASL\approx log_2(n+1)-1$,判定树种的树高$h=\lceil log_2(n+1) \rceil$
- 即$O(log_2n)$,平均情况下比顺序表查找的效率高。
- 折半查找仅适用于线性表的顺序存储结构,不适合与链式存储结构,且要求元素按关键字有序排列。
分块查找
B树
B+树
散列表
串
Sorting
复习提示
- 堆排序(建堆、插入和调整)、快速排序(划分、过程特征)、归并排序(归并路数、归并过程)是重点。
- 读者应深入掌握各种排序算法的思想、排序过程(能动手模拟) 和特征(初态的影响、时空复杂度、稳定性、适用性等)
- 常以选择题的形式考查不同算法之间的对比
- 对于一些常用排序算法的关键代码,要达到熟练编写的程度;
- 看到某特定序列,读者应具有选择最优排序算法(根据排序算法特征)的能力。
graph LR
A(排序) --- B(基本概念)
B --- B1(稳定性)
B --- B2("衡量标准: 时,空复杂度")
A --- C(内部排序)
C --- C1(插入排序)
C1 --- C11(直接插入排序)
C1 --- C12(折半插入排序)
C1 --- C13(希尔排序)
C --- C2(交换排序)
C2 --- C21(冒泡排序)
C2 --- C22(快速排序)
C --- C3(选择排序)
C3 --- C31(简单选择排序)
C3 --- C32(堆排序)
C --- C4(归并排序)
C --- C5(基数排序)
A --- D("外部排序----多路归并排序")
插入排序
直接插入排序
void InsertSort(ElemType A[], int n) {
int i,j;
for (i=2; i<=n; i++) { // 依次将A[2] ~ A[n]插入到前面已排序序列
if (A[i].key < A[i-1].key)
A[0]=A[i];
for (j=i-1; A[0].key < A[j].key; --j)
A[j+1]=A[j]; // 向后挪位
A[j+1]=A[0];
}
}
折半插入排序
void InsertSort(ElemType A[], int n) {
int i,j,low,high,mid;
for (i=2; i<=n; i++) { // 依次将A[2] ~ A[n]插入到前面已排序序列
A[0]=A[i];
low=1; high=i-1;
while (low <= high) {
mid=(low+high)/2;
if (A[mid].key > A[0].key) high=mid-1;
else low=mid+1;
}
for (j=i-1; j>=high+1; --j)
A[j+1]=A[j];
A[high+1]=A[0];
}
}
希尔排序
void ShellSort(ElemType A[], int n) {
for (dk=n/2; dk>=1; dk=dk/2)
for (i=dk+1; i<=n; ++1)
if(A[i].key < A[i-dk].key) {
A[0]=A[i];
for (j=i-dk; j>0&&A[0].key < A[j].key; j-=dk)
A[j+dk]=A[j];
A[j+dk]=A[0];
}//if
}
交换排序
冒泡排序
void BubbleSort(ElemType A[], int n) {
for (i=0; i<n-1; i++) {
flag=false;
for(j=n-1; j>i; j--)
if (A[j-1].key > A[j].key) {
swap(A[j-1], A[j]);
flag=true;
}
if (flag==false)
return;
}
}
快速排序
void QuickSort(ElemType A[], int low, int high) {
if (low<high) {
int pivotpos=Partition(A, low, high);
QuickSort(A, low, pivotpos-1);
QuickSort(A, pivotpos+1, high);
}
}
int partition(ElemType A[], int low, int high) {
ElemType pivot=A[low];
while(low<high) {
while(low<high&&A[high] >= pivot) --high;
A[low]=A[high];
while(low<high&&A[low] <= pivot) ++low;
A[high]=A[low];
}
A[low]=pivot;
return low;
}
选择排序
归并排序
基数排序
各种内部排序算法的比较和应用
外部排序
小结
Principles of Computer Composition
大纲
[考查目标]
1。理解单处理器计算机系统中各部件的内部工作原理、组成结构以及相互连接方式,
具有完整的计算机系统的整机概念。
2。理解计算机系统层次化结构概念,熟悉硬件与软件之间的界面,掌握指令集体系结
构的基本知识和基本实现方法。
3。能够综合运用计算机组成的基本原理和基本方法,对有关计算机硬件系统中的理论
和实际问题进行计算、分析,对一些基本部件进行简单设计;并能对高级程序设计语言(如
C 语言)中的相关问题进行分析。
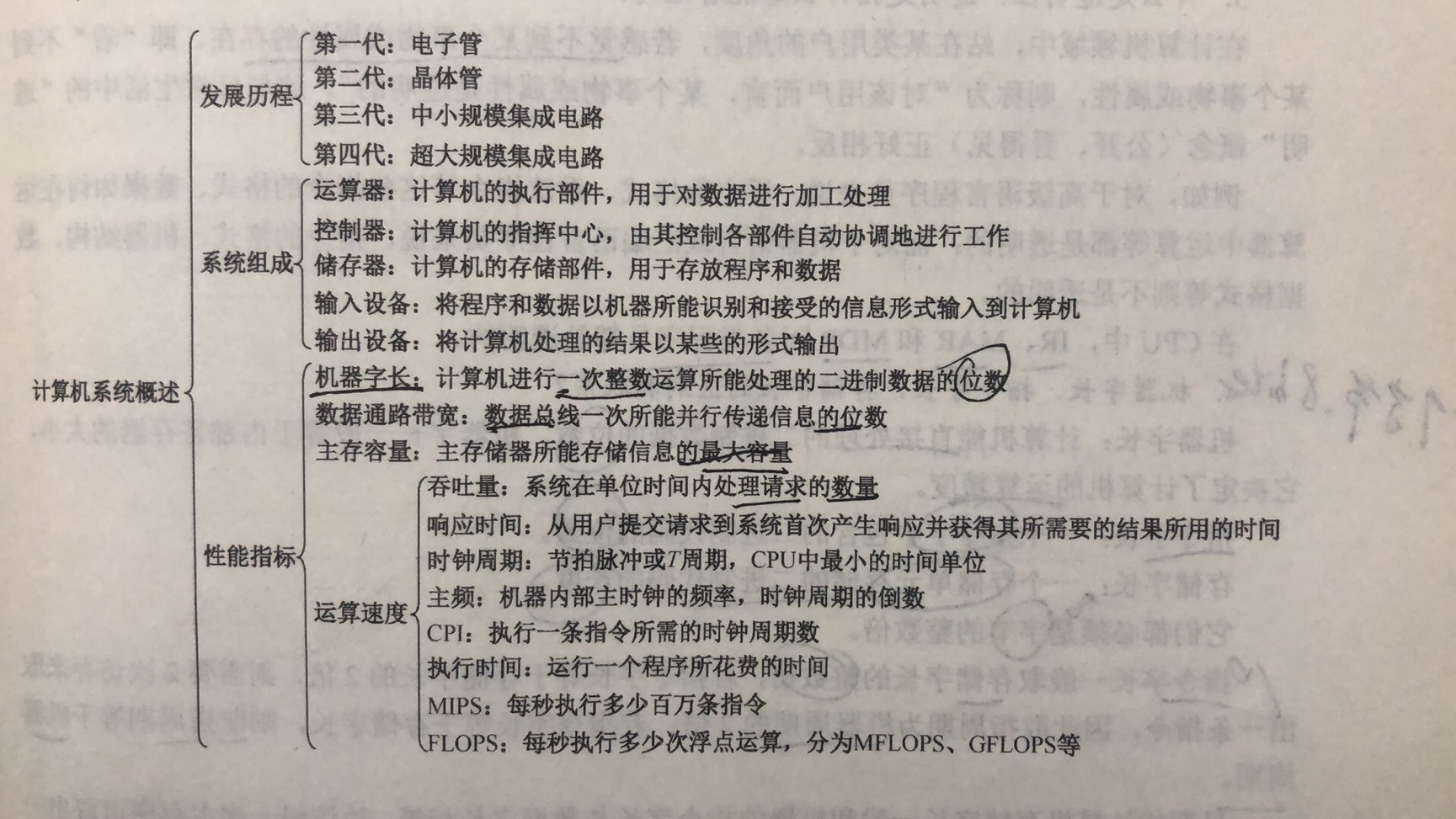
一、计算机系统概述
(一)计算机发展历程
(二)计算机系统层次结构
- 计算机系统的基本组成
计算机硬件的基本组成
计算机软件和硬件的关系
计算机的工作过程
(三)计算机性能指标
吞吐量、响应时间;CPU 时钟周期、主频、CPI、CPU 执行时间;MIPS、MFLOPS 、GFLOPS、
TFLOPS、PFLOPS。
二、数据的表示和运算
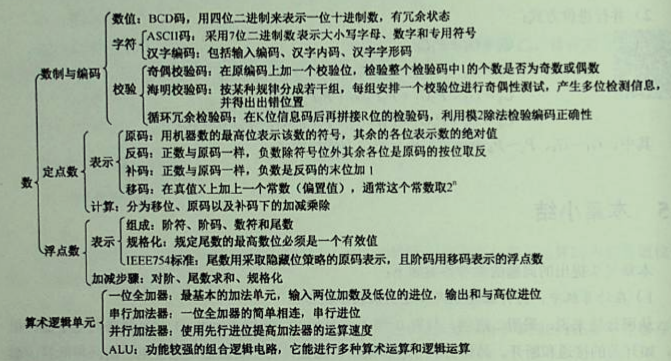
(一)数制与编码
1。进位计数制及其相互转换
2。真值和机器数
3.BCD 码
- 字符与字符串
5。校验码
(二)定点数的表示和运算
1。定点数的表示
无符号数的表示;有符号整数的表示。
2。定点数的运算
定点数的位移运算;原码定点数的加减运算;补码定点数的加/减运算;定点数的乘/
除运算;溢出概念和判别方法。
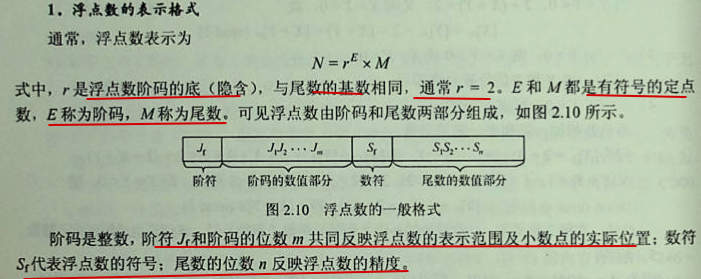
(三)浮点数的表示和运算
1。浮点数的表示
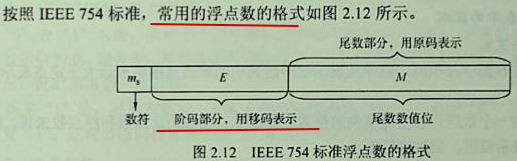
IEEE 754 标准
2。浮点数的加/减运算
(四)算术逻辑单元 ALU
1。串行加法器和并行加法器
2。算术逻辑单元 ALU 的功能和结构
三、存储器层次结构
(一)存储器的分类
(二)存储器的层次化结构
(三)半导体随机存取存储器
1.SRAM 存储器
2.DRAM 存储器
3。只读存储器
4.Flash 存储器
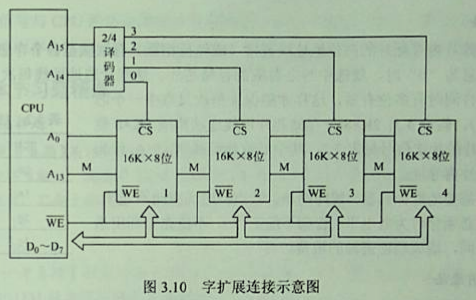
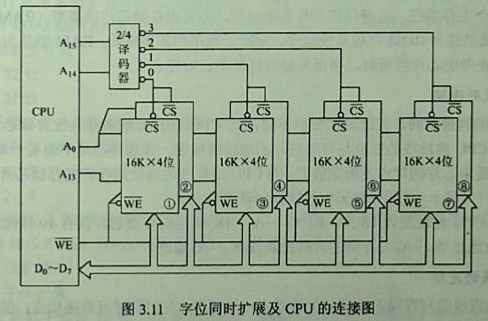
(四)主存储器与 CPU 的连接
(五)双口 RAM 和多模块存储器
(六)高速缓冲存储器(Cache)
1.Cache 的基本工作原理
2.Cache 和主存之间的映射方式
3.Cache 中主存块的替换算法
4.Cache 写策略
(七)虚拟存储器
1。虚拟存储器的基本概念
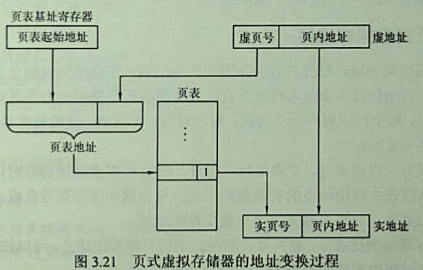
2。页式虚拟存储器
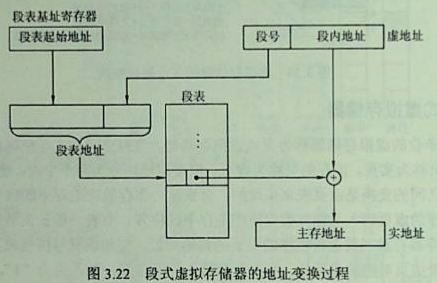
3。段式虚拟存储器
4。段页式虚拟存储器
5.TLB(快表)
四、指令系统
(一)指令格式
1。指令的基本格式
2。定长操作码指令格式
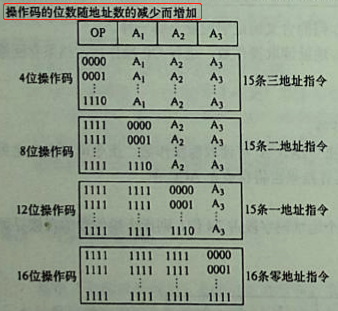
3。扩展操作码指令格式
(二)指令的寻址方式
1。有效地址的概念
2。数据寻址和指令寻址
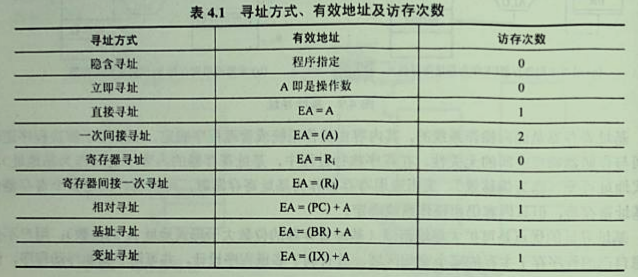
3。常见寻址方式
(三)CISC 和 RISC 的基本概念
五、中央处理器(CPU)
(一)CPU 的功能和基本结构
(二)指令执行过程
(三)数据通路的功能和基本结构
(四)控制器的功能和工作原理
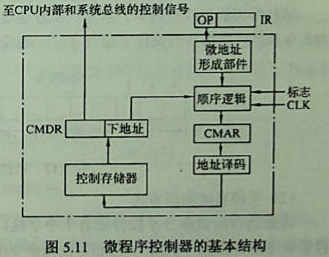
1、硬布线控制器
2、微程序控制器
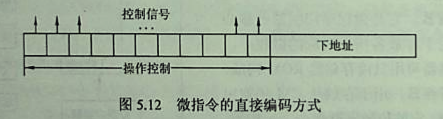
微程序、微指令和微命令;微指令的编码方式;微地址的形式方式。
(五)指令流水线
1、指令流水线的基本概念
2、指令流水线的基本实现
3、超标量和动态流水线的基本概念
六、总线
(一)总线概述
1、总线的基本概念
2、总线的分类
3、总线的组成及性能指标
(二)总线仲裁
1、集中仲裁方式
2、分布仲裁方式
(三)总线操作和定时
1、同步定时方式
2、异步定时方式
(四)总线标准
七、输入输出(I/O)系统
(一)I/O 系统基本概念
(二)外部设备
1、输入设备:键盘、鼠标
2、输出设备:显示器、打印机
3、外存储器:硬盘存储器、磁盘阵列、光盘存储器
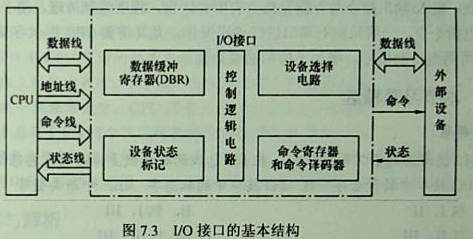
(三)I/O 接口(I/O 控制器)
1、I/O 接口的功能和基本结构
2、I/O 端口及其编址
(四)I/O 方式
1、程序查询方式
2、程序中断方式
中断的基本概念;中断响应过程;中断处理过程;多重中断和中断屏蔽的概念。
3、DMA 方式
DMA 控制器的组成,DMA 传送过程。
一、计算机系统概述
复习提示
重点掌握各个性能指标的计算和基本概念。
概念
小记
英文缩写
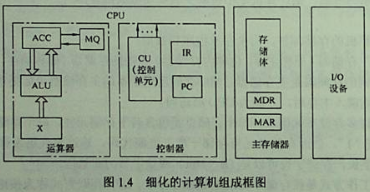
存储器
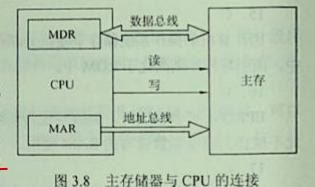
- MAR - 地址寄存器,多少个存储单元,即为内存
- MDR - 数据寄存器,64k x 32位,即为存储容量
运算器
- ALU - 算术逻辑单元
- ACC - 累加器
- MQ - 乘商寄存器
- X - 操作数寄存器
- IX - 变址寄存器
- BR - 基址寄存器
- PSW - 程序状态寄存器
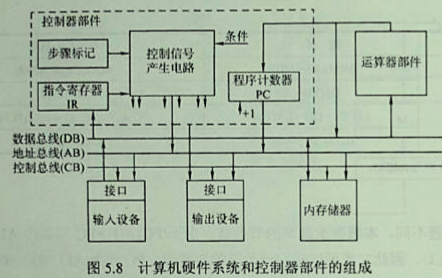
- 控制器
- PC - 程序计数器
- IR - 指令寄存器,OP-操作码,Ad - 地址码
- CU - 控制单元
性能指标
机器字长,计算机能直接处理的二进制数据的位数,一般等于内部寄存器的大小,决定计算机的运算精度。
数据通路带宽,数据总线一次所能并行传送信息的位数。(外部)
主存容量,指主存储器所能存储信息的最大容量,MAR的位数反映存储单元的个数。
运算速度
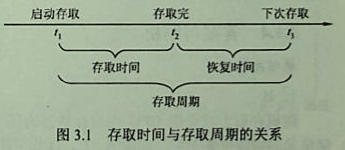
吞吐量,指系统在单位时间内处理请求的数量。主要取决于主存的存取周期
响应时间,
CPU时钟周期,常为节拍脉冲或T周期,即主频的倒数,是CPU中最小的时间单位,每个动作至少需要1个时钟周期。
主频(CPU时钟频率),衡量机器速度的重要参数,主频越高,速度越快。1Hz表示每秒1次。
CPI(Clock cycle Per Instruction),指执行一条指令所需的时钟周期数。
CPU执行时间,指运行一个程序所花费的时间
CPU执行时间=CPU时钟周期数 / 主频=(指令条数 x CPI)/ 主频
MIPS、MFLOPS(百万)、GFLOPS(十亿)、TFLOPS(万亿)
Others
三种语言
机器语言,汇编语言(汇编程序),高级语言(编译-汇编 | 翻译)
计算机的工作过程
取指令:(PC) -> MAR -> M -> MDR -> IR
分析指令: OP(IR) -> CU
执行指令: Ad(IP) -> MAR -> M -> MDR -> ACC
: (PC)+1 -> PC
计算机系统的多层次结构
微程序机器层 - 传统机器语言层 - 操作系统层 - 汇编语言层 - 高级语言层.
“裸机” - 没有配备软件的纯硬件系统,3-5层称为虚拟机
计算机体系结构和计算机组成的区别和联系
二、数据的表示和运算
复习提示
纵观近几年真题,不难发现unsigned, short, int, long, float, double, 等在C语言中的表示,运算,溢出判断,隐式类型转换, 强制类型转换, IEEE 754浮点数的表示, 以及浮点数的运算,都是考验的重点,需要牢固掌握。
数制与编码
Base
- 十进制(Decimal),二进制(Binary),十六进制(Hexadecimal),八进制(Octal)
- 基数,位权,数码
- int, long, unsigned, unsigned long, float : 32位,4字节
- short, unsigned short: 16位, 2字节
- char: 8位,1字节
- double: 64位,8字节
进制转换
- 二转八或十六,
- 一串二进制数分为3位(八进制)或4位(十六进制)
- 整数,小数点向左;小数,小数点向右
- 任意转十,数码与权值相乘,乘积叠加
- 十转任意,基数乘除法
- 整数部分采用除基取余法
- 小数部分采用乘基取整法,ps: 不是每个十进制小数都可以准确地用二进制表示,比如0.3
真值,机器数:真值是带符号“+” 和 “-”的数, 机器数是将符号数字化的数,如 0为正,1为负。
BCD码,二进制编码的十进制数(Binary-Coded Decimal, BCD),常采用4位二进制数表示一位十进制的数码。有8421码,余3码,2421码
- 余3码,在8421码的基础上加(0011)
- 2421码,特点是大于5的4位二进制数中的最高位为1。如: 5 —> 1011
字符与字符串
- 字符编码ASCII码,占7位,表示128个字符。
- 汉字的表示和编码,占两个字节。
校验码
定点数的表示与运算
表示
运算
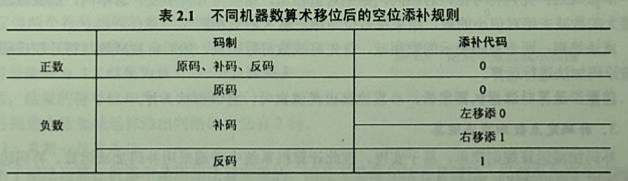
移位
原码定点数的加减法运算
补码定点数的加减法运算
计算机系统中普遍采用补码加减运算
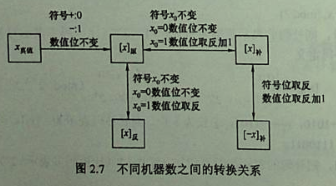
符号扩展
- 整数,所有附加位都用 0进行填充
- 负数-补码,所有附加位用 1(整数) 或 0(小数)进行填充
- 负数-反码,所有附加位用 1进行填充
溢出概念和判别方法
大于机器所能表示的最大正数为 上溢
小于机器所能表示的最小负数为 下溢
补码溢出判断
- 采用一位符号位
V=0,表示无溢出;V=1,表示有溢出
2. 采用双符号位,也称模 4 补码
$S_{s1}S_{s2}$相同,表示未溢出,不同,表示溢出,此时最高位符号位代表真正的符号
3. 采用一位符号位根据数据位的进位情况判断溢出
若符号位的进位$C_s$与最高数位的进位相同,说明没有溢出,否则表示发生溢出
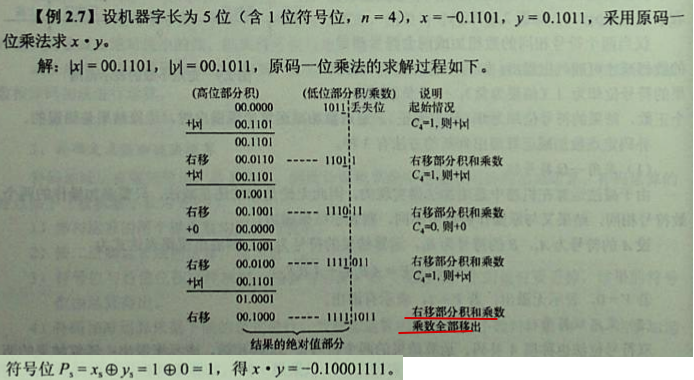
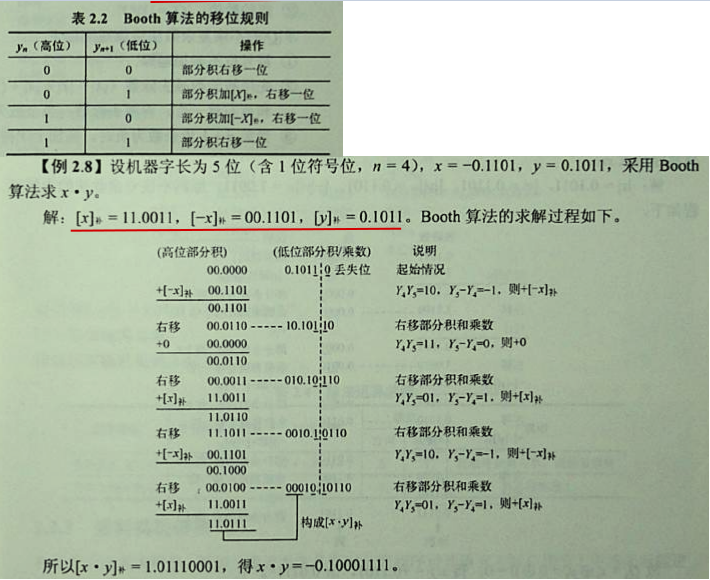
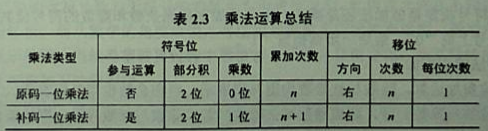
定点数的乘法运算
乘法运算由累加和右移操作实现
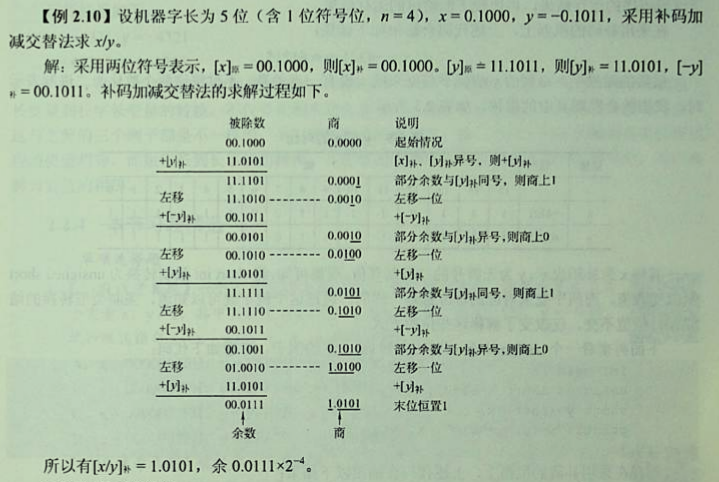
定点数的除法运算
除法运算可转换成 “累加-左移”(逻辑左移)
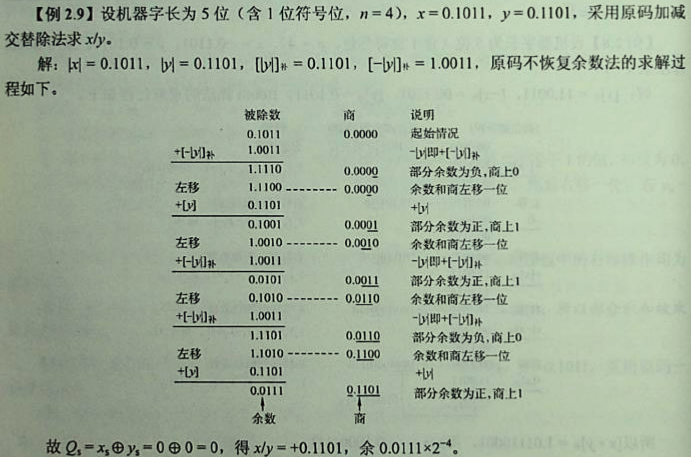
补码除法,(加减交替法)
- 被除数与除数同号,则被除数减去除数;异号,被除数加上除数
- 余数与除数同号,则商上 1,余数左移一位减去除数;异号,则商上 0,余数左移一位加上除数
- 若对商的精度没有特殊要求,则一般采用 “末位恒置 1” 法
- Tips
- 异号相除是看够不够减,然后上商,够减商0,不够减商1.
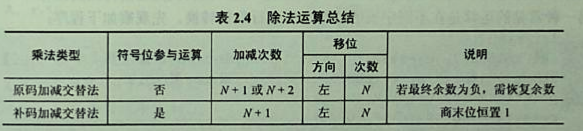
除法运算总结
强制类型转换
- 强制类型转换的结果保持位值不变,仅改变了解释这些位的方式。
数据的存储和排列,
- 大端方式和小端方式
- 边界对齐方式相对边界不对齐方式是一种空间换时间的思想。
浮点数的表示与运算
表示
浮点数的加减运算
特点:阶码运算和尾数运算分开进行,一律采用补码.
分为以下几步:
算术逻辑单元(ALU)
加法器
一位全加器 |
- 串行加法器,
- 加法分 n 次进行
- 器件少,成本低;运算速度慢,多用于某些低俗的专用运算器
- 并行加法器
- 位数与机器的字长相同
- 并行加法器的最长运算时间主要由进位信号的产生和传递时间决定
- 串行进位,又称行波进位,位数越多延迟时间就越长;最长运算时间取决于进位信号的传递时间;
- 并行进位,又称先行进位、同时进位;
- 分组并行进位方式,常用,组内并行,组间串行
- 并行快速进位方式
- 单级先行进位方式,又称组内并行,组间串行进位方式
- 多级先行进位方式,又称组内并行,组间并行进位方式
算术逻辑单元的功能和结构
三、存储系统
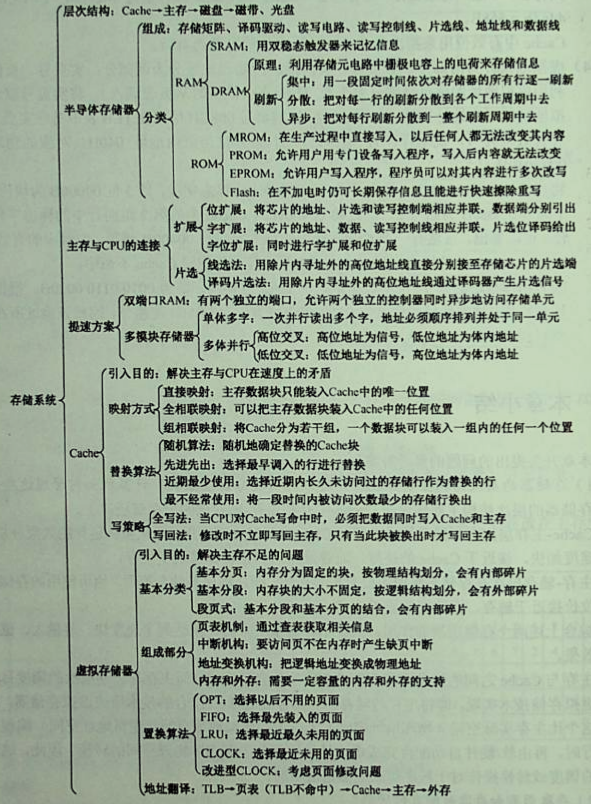
1. 存储器的层次结构
分类
作用
主存储器(主存,内存)、辅助存储器(外存)、高速缓冲存储器(Cache)
介质
磁表面存储器(磁盘,磁带)、磁心存储器半导体存储器(MOS行存储器,双极行存储器)和光存储器(光盘)
存取方式
随机存储器(RAM)、只读存储器(ROM)、串行访问存储器
可保存性
易失存储器,非易失存储器
性能指标
存储容量 | 单位成本 |
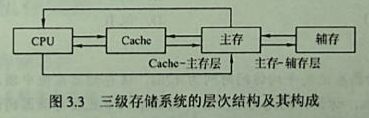
2. 存储器的层次化结构
(磁带,光盘)—> 磁盘—> 主存—> Cache—> 寄存器
3. 半导体随机存储器
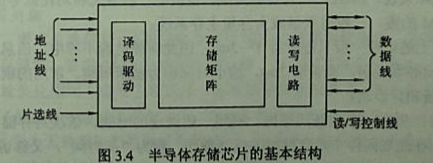
半导体存储芯片
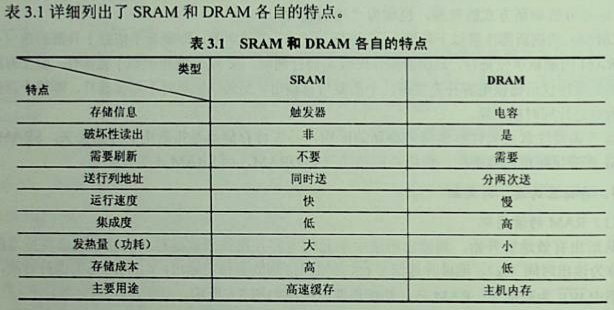
SRAM和DRAM
SRAM工作原理
DRAM工作原理
DRAM电容上的电荷只能维持1~2 ms
集中刷新,
读写操作时,不受刷新影响,因此系统的存取速度较高;缺点是在集中刷新期间(死区)不能访问存储器。
分散刷新
优点是没有死区;缺点是加长了系统的存取周期,降低了整机的速度
异步刷新
前两种的结合。避免是CPU连续等待过长的时间,而且减少了刷新次数,从根本上提高了整机的工作效率
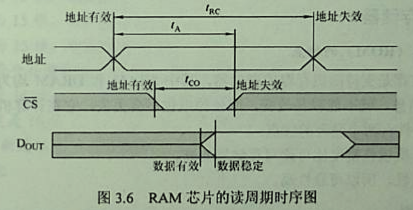
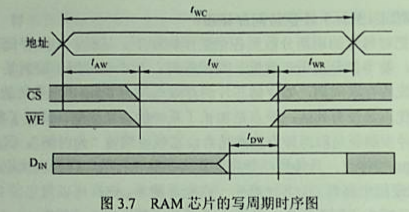
RAM的读 写周期
写周期不明确
SRAM 和 DRAM 的比较.
tips
只读存储器
4. 主存储器与CPU的连接
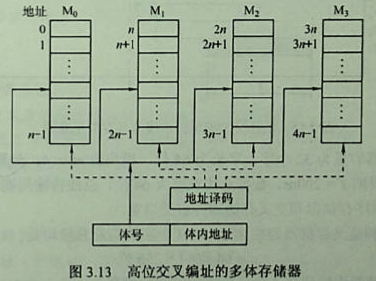
5. 双端口RAM和多模块存储器
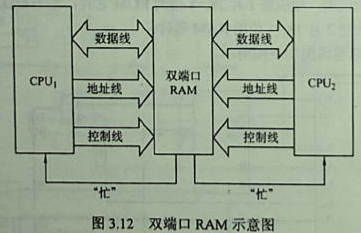
为了提高CPU访存速度,可采用双端口存储器、多模块存储器等技术,它们同属并行技术,前者为空间并行,后者为时间并行。
双端口RAM
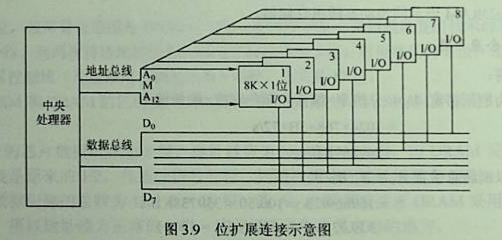
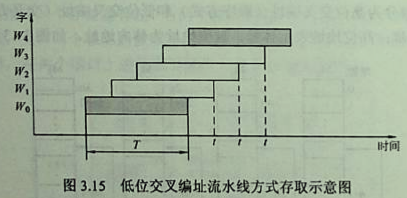
多模块存储器
单体多字存储器
- 优:增大了存储器的宽度,提高了单体存储器的工作速度
- 缺:指令和数据在主存内必须是连续存放的,一旦遇到转移指令,或操作数不能连续存放,这种方法的效果就不明显
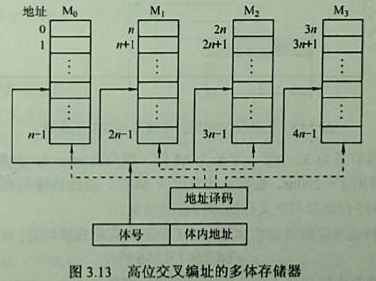
多体并行存储器
6. 高速缓冲存储器
因为单纯依靠并行主存系统提高主存系统的频宽是有限的,所以 Cache 闪亮登场.
程序访问的局部性原理,包括时间局部性和空间局部性
高速缓冲技术就是利用程序访问的局部性原理。
Cache的基本工作原理,cache常由SRAM构成
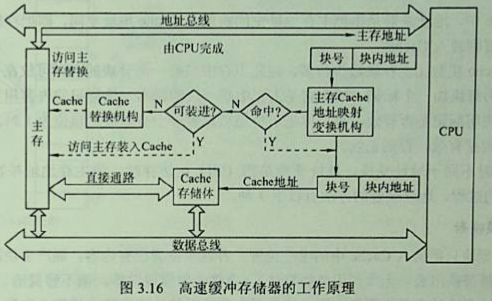
- CPU与Cache之间的数据交换以字位单位,而Cache与主存之间的数据交换以Cache块进行。
- Cache写策略处理,全写法和写回法
- Cache的命中率,$H=N_c / (N_c+N_m)$
- Cache-主存系统的平均访问时间 $T_a=Ht_c + (1-H)t_m$
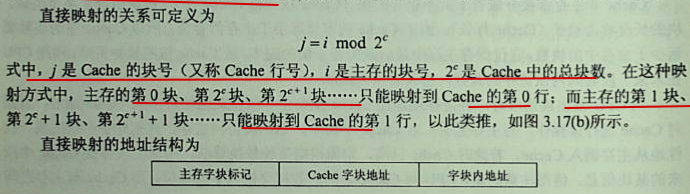
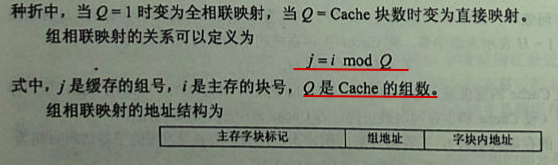
Cache和主存的映射方式
在Cache中,地址映射是指把主存地址空间映射到Cache地址空间,即把存放在主存中的程序按照某种规则装入Cache。
地址映射不同于地址变换,地址变换是指CPU在访存时,将主存地址按映射规则换算成Cache地址的过程。
Cache中主存块的替换算法
随机算法(RAND)
实现比较简单,但未依据程序访问的局部性原理,故可能命中率较低.
先进先出算法(FIFO)
容易实现,但也未依据程序访问的局部性原理,可能会把常用的程序块作为最早进入Cache的块替换掉。
近期最少使用算法(LRU)
依据程序访问的局部性原理选择近期内长久未访问过的存储行作为替换的行,平均命中率要比FIFO的高,是堆栈类算法。
LRU对每行设置一个计数器,Cache每命中一次,命中行计数清 0,其它行计数器均加 1。计数值最大的行换出。
最不经常使用算法(LFU)
将一段时间内被访问次数最少的存储行换出,每行也设置一个计数器,新行初始为0,每访问一次,被访问行计数器加 1,计数值最小的行换出
Cache写策略,对于Cache写命中 (write hit)
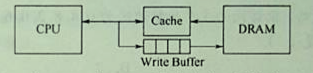
全写法(写直通法,write-through)
实现简单,随时保持主存数据的正确性。缺点:增加了访存次数,降低了Cache的效率。
写缓冲(Write Buffer):减少全写法直接写入主存的时间消耗,是一个FIFO队列
写回法(write-back)
当CPU对Cache写命中时,只修改Cache的内容,而不立即写入主存,只有当此块被换出时才写回主存。
减少了访存次数,但存在不一致的隐患,
每个Cache行必须设置一个标志位(脏位),以反映此块是否被CPU修改过。
写不命中
写分配法(write-allocate)
加载主存中的块到Cache中,然后更新这个Cache块,它试图利用程序的空间局部性,但缺点是每次不命中都需要从主存中读取一块
非写分配法(not-write-allocate)
只写入主存,不进行调块
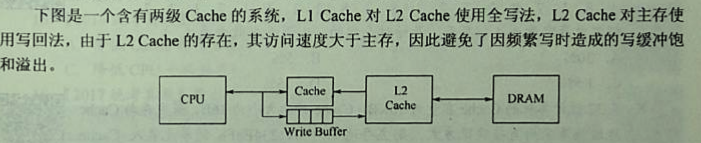
多级Cache
通常为 3 级,离CPU越远,访问速度越慢,容量越大。指令Cache与数据Cache分离一般在L1级,此时通常为写分配法与写回法合用。
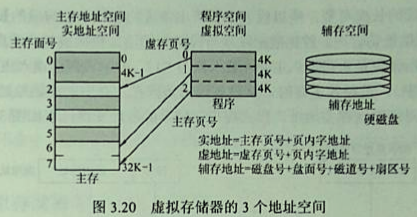
7. 虚拟存储器
虚拟存储器具有主存的速度和辅存的容量,提高了存储系统的性价比。
基本概念
页式虚拟存储器
段式虚拟存储器
段页式虚拟存储器
块表(TLB)
- 存储在高速缓冲器的页表项,相应地存放在主存中的页表为慢表(Page),是块表的超集。
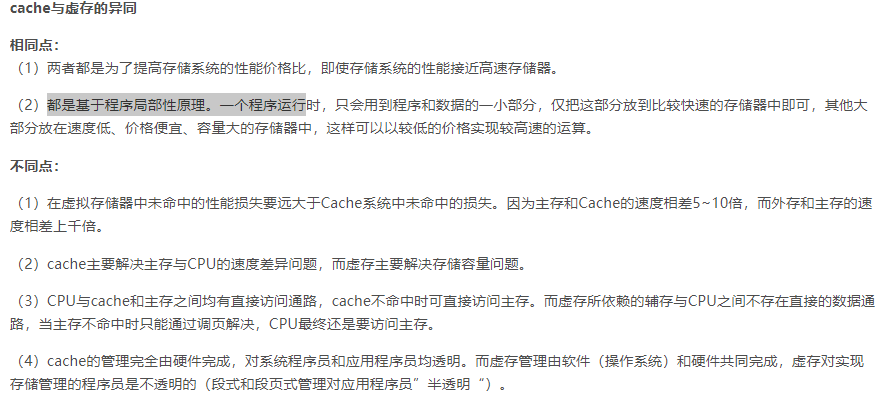
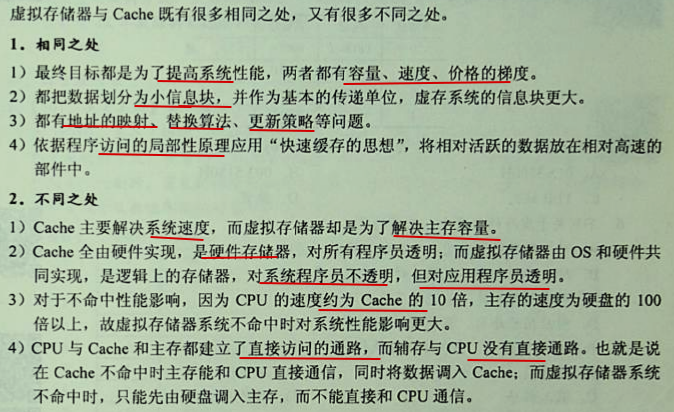
虚拟存储器与Cache的比较
8. tips
四、指令系统
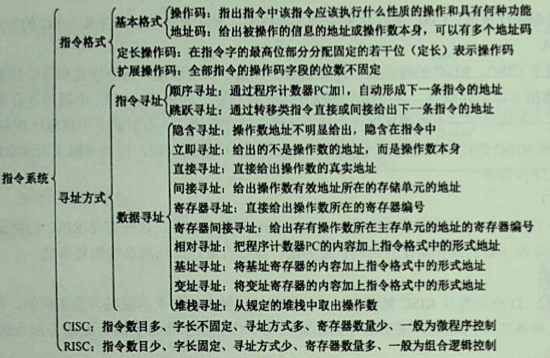
1. 指令格式
指令,又称机器指令,是计算机运行的最小功能单位。指令系统是计算机的主要属性,位于硬件和软件的交界层面上。
2. 指令寻址方式
寻址方式是指寻找指令或操作数有效地址的方式,即确定本条指令的数据地址及下一条待执行指令的地址的方法。形式地址(A)+ 寻址方式 = 有效地址(EA).
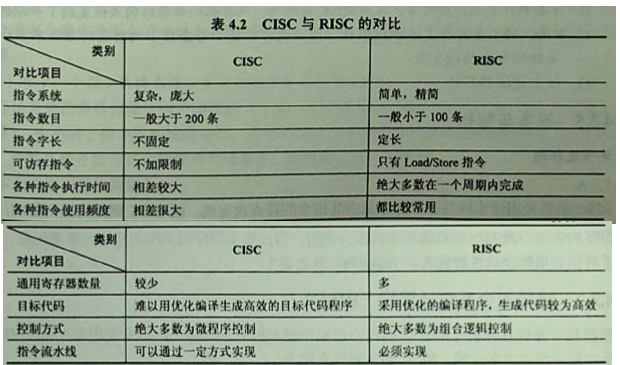
3. CISC和RISC的基本概念
复杂指令系统计算机(CISC)
精简指令系统计算机(RISC)
两者的比较
五、中央处理器
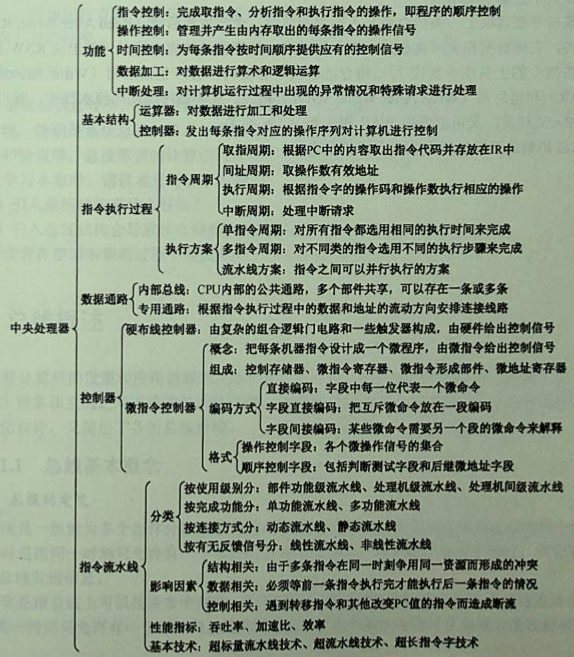
1. CPU的功能和基本结构
功能
- 控制器的功能是负责协调并控制计算机各部件执行程序的指令序列,包括取指令、分析指令和执行指令。
- 运算器的功能是对数据进行加工。
- CPU的功能包括:1. 指令控制;2.操作控制;3.时间控制;4.数据加工;5.中断处理
基本结构
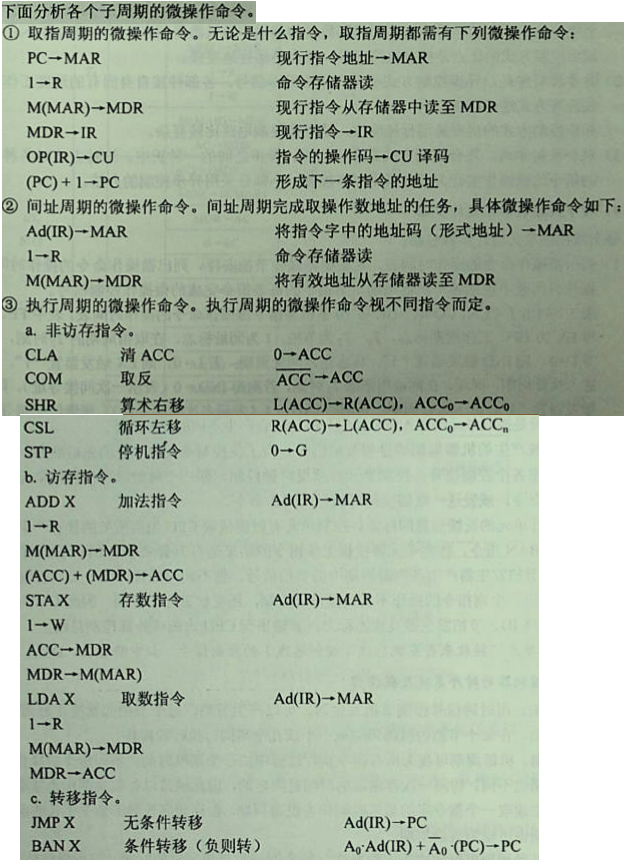
2. 指令执行过程
指令周期
- CPU从主存中每取出并执行一条指令所需的全部时间称为指令周期。
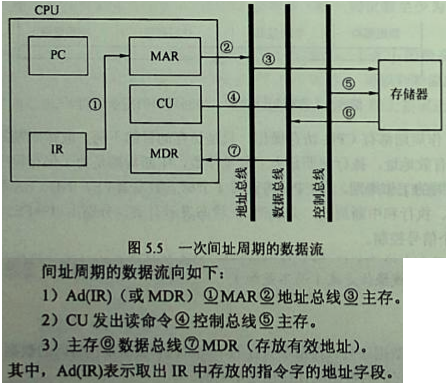
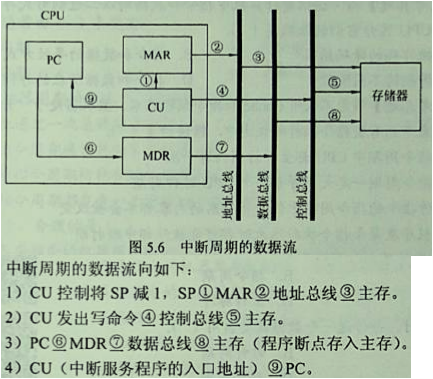
- 取指周期:取指令;间址周期:取有效地址;执行周期:取操作数;中断周期:保存程序断点。
- 4个标志触发器FE、IND、EX 和 INT,分别对应上述四个周期,1 状态表示有效
- 中断周期中的进栈操作是减 1,因为计算机的堆栈中都是向低地址增加。
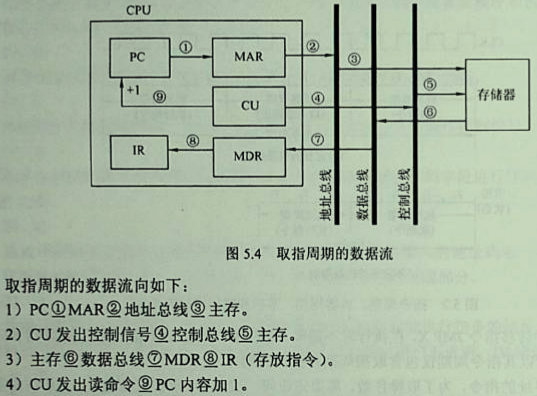
指令周期的数据流
数据流是根据指令要求依次访问的数据序列。
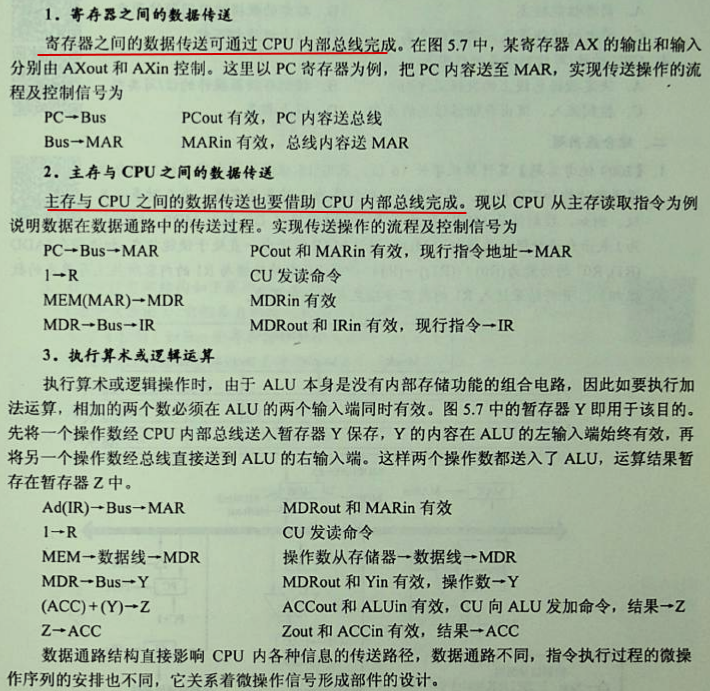
3. 数据通路的功能和基本结构
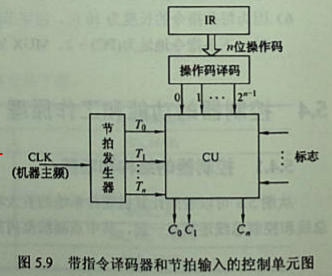
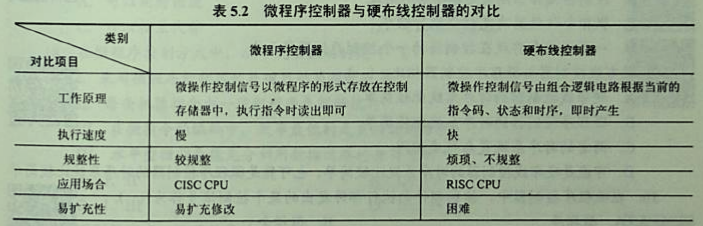
4. 控制器的功能和工作原理
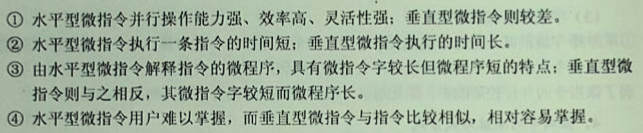
5. 指令流水线
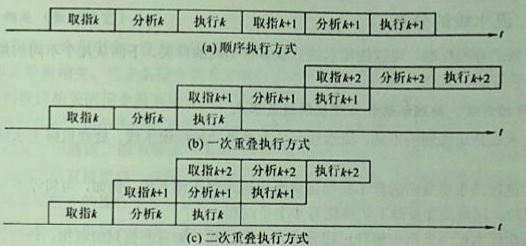
流水线的表示方法,时空图
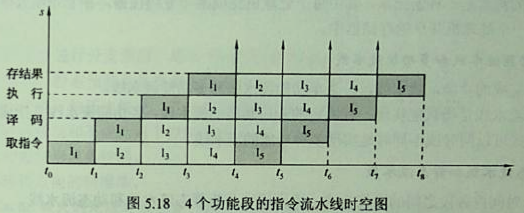
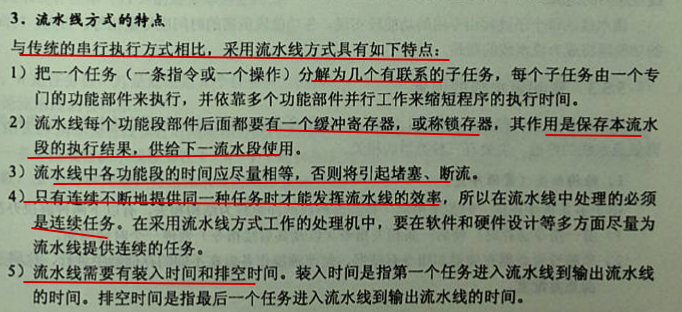
流水线方式的特点,见书。
流水线的分类
- 部件功能级,处理机级和处理机间级流水线
- 单功能流水线和多功能流水线
- 动态流水线和静态流水线
- 线性流水线和非线性流水线
影响流水线的因素
- 结构相关(资源冲突)
- 数据相关(数据冲突)
- 控制相关(控制冲突)
流水线的性能指标
超标量流水线的基本概念
六、总线
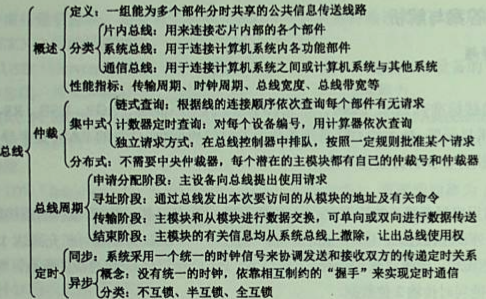
1. 总线概述
为了更好地解决 I/O 设备和主机之间连接的灵活性问题,计算机的结构从分散连接发展为总线连接,为了进一步简化设计,又提出了各类总线标准。
基本概念
总线特性:是指机械特性(尺寸,形状)、电器特性(传输方向和有效的电平范围)、功能特性(每根传输线的功能)和时间特性(信号和时序的关系)。
总线的猝发传输方式,在一个总线周期内传输存储地址连续的多个数据字的总线传输方式,称为猝发传送。
分类
按功能划分为以下 3 类:
片内总线,是CPU芯片内部寄存器与寄存器之间、寄存器与ALU之间的公共连接线。
系统总线,是计算机系统内各功能部件(CPU,主存,I/O连接)之间相互连接的总线。
数据通路是数据流经的路径,数据总线是承载的媒介。
按传送信息内容的不同,又可分为 3 类:
- 数据总线,用来传输数据信息,是双向传输总线,其位数与机器字长、存储字长相关
- 地址总线,用来指出数据总线上的源数据或目的数据所在的主存单元或 I/O 端口的地址,是单向传输总线,地址总线的位数与主存地址空间的大小有关。
- 控制总线,用来传输控制信息,包括CPU送出的控制命令和主存(或外设)返回CPU的反馈信号。
通信总线,也称为外部总线
通信总线是在计算机系统之间或计算机系统与其他系统(如远程通信设备、测试设备)之间传送信息的总线
结构
单总线结构,主存总线
双总线结构,主存总线 和 I/O 总线
- 三总线结构,主存总线,I/O总线,直接内存访问(DMA)总线
性能指标
1.总线的传输周期,2.总线时钟周期,3.总线的工作频率, 4.总线的时钟频率, 5.总线宽度,6.总线带宽,7.总线复用,8.信号线数
2. 总线仲裁
集中仲裁方式
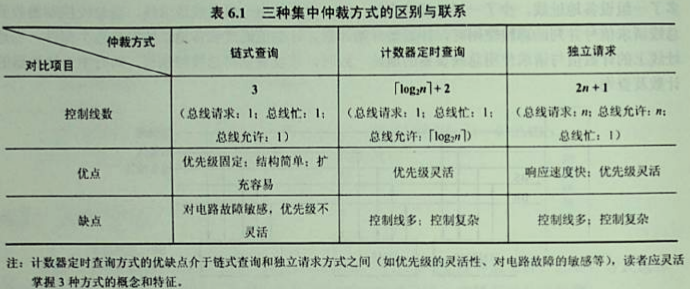
分布仲裁方式
3. 总线操作和定时
总线定时是指总线在双方交换数据的过程中国需要时间上配合关系的控制,这种控制称为总线定时,其实质是一种协议或规则,主要有同步和异步两种基本定时方式。
4. 总线标准
七、输入/输出系统
1. I/O系统基本概念
2. 外部设备
输入设备
键盘,鼠标(机械式,光电式)
输出设备
外存储器
磁盘存储器,磁盘阵列,光盘存储器,固态硬盘
3. I/O接口
功能
- 实现主机和外设的通信联络控制
- 进行地质译码和设备选择
- 实现数据缓冲
- 信号格式的转换
- 传送控制命令和状态信息
基本结构
类型
- 按数据传送方式可分为并行接口(一个字节或一个字的所有位同时传送)和串行接口(一位一位地传送),接口要完成数据格式的转换
- 按主机访问 I/O 设备的控制方式可分为程序查询接口,终端接口和 DMA接口等
- 按功能选择的灵活性可分为可编程接口和不可编程接口
端口及其编址
对 I/O 端口的编址方式:
- 统一编址,又称存储器映射方式
- 独立编址,又称 I/O 映射方式
4. I/O方式
- 程序查询方式
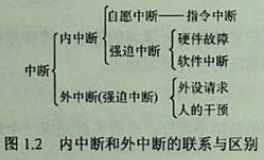
- 程序中断方式
- 中断的基本概念
- 程序中断方式工作流程
- 多重中断和中断屏蔽技术
- DMA方式
- DMA方式的特点
- DMA控制器的组成
- DMA的传送方式
- DMA的传送过程
- DMA方式和中断方式的区别
疑难杂症
Computer Operating System
大纲
[考查目标]
1。掌握操作系统的基本概念、基本原理和基本功能,理解操作系统的整体运行过程。
2。掌握操作系统进程、内存、文件和 I/O 管理的策略、算法、机制以及相互关系。
3。能够运用所学的操作系统原理、方法与技术分析问题和解决问题,并能利用 C 语言
描述相关算法。
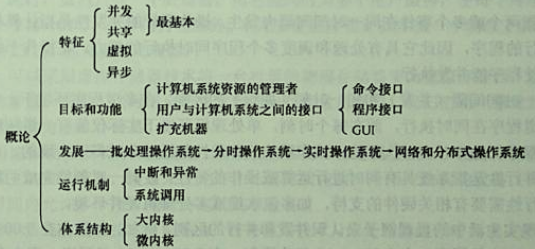
一、操作系统概述
(一)操作系统的概念、特征、功能和提供的服务
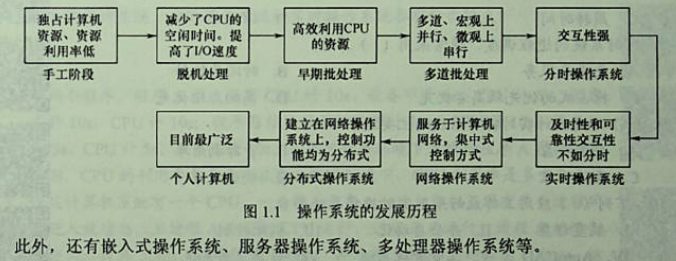
(二)操作系统的发展与分类
(三)操作系统的运行环境
1。内核态与用户态
2。中断、异常
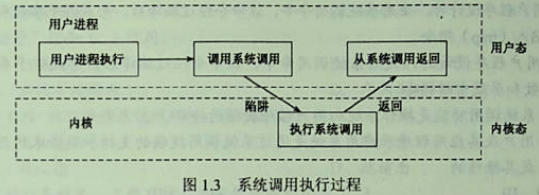
3。系统调用
(四)操作系统体系结构
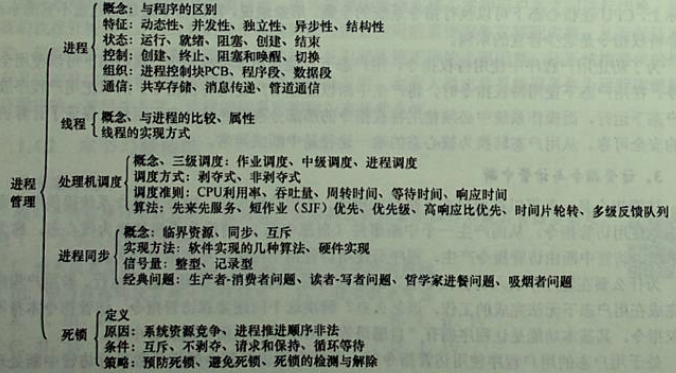
二、进程管理
(一)进程与线程
1。进程概念
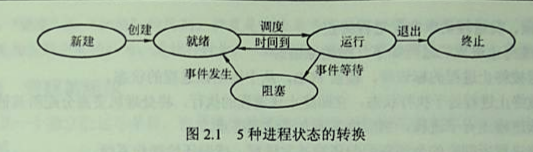
2。进程的状态与转换
3。进程控制
4。进程组织
5。进程通信
共享存储系统;消息传递系统;管道通信。
6。线程概念与多线程模型
(二)处理机调度
1。调度的基本概念
2。调度时机、切换与过程
3。调度的基本准则
4。调度方式
5。典型调度算法
先来先服务调度算法;短作业(短进程、短线程)优先调度算法;时间片轮转调度算法;
优先级调度算法;高响应比优先调度算法;多级反馈队列调度算法。
(三)同步与互斥
1。进程同步的基本概念
2。实现临界区互斥的基本方法
软件实现方法;硬件实现方法。
3。信号量
4。管程
5。经典同步问题
生产者-消费者问题;读者-写者问题;哲学家进餐问题。
(四)死锁
1。死锁的概念
2。死锁处理策略
3。死锁预防
4。死锁避免
系统安全状态,银行家算法。
5。死锁检测和解除
三、内存管理
(一)内存管理基础
1。内存管理概念
程序装入与链接;逻辑地址与物理地址空间;内存保护。
2。交换与覆盖
3。连续分配管理方式
4。非连续分配管理方式
分页管理方式;分段管理方式;段页式管理方式。
(二)虚拟内存管理
1。虚拟内存基本概念
2。请求分页管理方式
3。页面置换算法
最佳置换算法(OPT);先进先出置换算法(FIFO);最近最少使用置换算法(LRU);
时钟置换算法(CLOCK)。
4。页面分配策略
5。工作集
6。抖动
四、文件管理
(一)文件系统基础
1。文件概念
2。文件的逻辑结构
顺序文件;索引文件;索引顺序文件。
3。目录结构
文件控制块和索引节点;单级目录结构和两级目录结构;树形目录结构;图形目录结构。
4。文件共享
5。文件保护
访问类型;访问控制。
(二)文件系统实现
1。文件系统层次结构
2。目录实现
3。文件实现
(三)磁盘组织与管理
1。磁盘的结构
2。磁盘调度算法
3。磁盘的管理
五、输入输出(I/O)管理
(一)I/O 管理概述
1.I/O 控制方式
2。 I/O 软件层次结构
(二)I/O 核心子系统
1.I/O 调度概念
2。高速缓存与缓冲区
3。设备分配与回收
4。假脱机技术(SPOOLing)
一、概述
Intro
二、进程管理
进程与线程
处理机调度

Intro
调度的时机、切换和过程
进程调度和切换程序是操作系统内核程序
- 不能马上进行进程调度与切换的情况,应置系统的请求调度标志,直到以下过程结束
- 在处理中断的过程中
- 进程在操作系统内核程序临界区中
- 其他需要完全屏蔽中断的原子操作过程中
- 应马上进行进程调度与切换的情况如下:
- 发生引起调度条件且当前进程无法继续运行下去时
- 中断处理结束或自陷处理结束后,返回被中断进程的用户态程序执行现场前,若置上请求调度标志,即可马上进行进程调度与切换。
进程调度方式
非剥夺调度方式,非抢占方式
适用于大多数的批处理系统,但它不能用于分时系统和大多数的实时系统
剥夺调度方式,抢占方式
该方式对提高系统吞吐率和响应效率都有明显的好处,但 “剥夺” 不是一种任意性行为,必须遵循一定的原则,主要有优先权、短进程优先和时间片原则等。
调度的基本准则
- CPU 利用率,尽可能使 CPU 保持 “忙” 状态,使这一资源利用率最高
- 系统吞吐量,表示单位时间内 CPU 完成作业的数量
- 周转时间
- 是指从作业提交到作业完成所经历的时间,是作业等待、在就绪队列中排队、在处理机上运行及进行输入/输出操作所花费时间的总和。
- 周转时间 = 作业完成时间 - 作业提交时间
- $带权周转时间 = \frac{作业周转时间}{作业实际运行时间}$
- 平均周转时间,平均带权周转时间
- 等待时间,
- 指进程处于等处理机状态的时间之和。
- 处理机调度算法只影响作业在就绪队列中等待所花的时间
- 该指标可以衡量一个调度算法的优劣
- 响应时间
典型的调度算法
先来先服务(FCFS)调度算法
短作业优先(SJF)调度算法
优先级调度算法
高响应比优先调度算法
时间片轮转调度算法
- 主要适用于分时系统
- 时间片的长短通常由以下因素确定:系统的响应时间、就绪队列中的进程数目和系统的处理能力
多级反馈队列调度算法(融合了前几种算法的优点)
- 是时间片轮转调度算法 和 优先级调度算法的综合与发展,可以兼顾多方面的系统指标
- 实现思想
- 多个就绪队列,第 1 级优先级最高
- 不同队列,每个进程的运行时间片越小
- 仅当第 1 - (i-1) 级队列均为空时,才会调度第 i 级队列,如有新进程进入高优先级队列,则被抢占
进程同步

Intro
实现临界区互斥的基本方法
信号量
Intro
- 可以用来解决互斥与同步问题,信号量只能被两个标准的原语 wait(S) | P 和 signal(S) | V 访问,也可记为 “P 操作” 和 “V 操作”
- 原语是指完成某种功能且不被分割、不被中断执行的操作序列,通常可有硬件实现。
Intro
整型信号量
记录性信号量
typedef struct {
int value;
struct process *L;
} semaphore;
void wait(semaphore S) { // 相当于申请资源
S.value--;
if(S.value < 0) {
add this process to S.L;
block(S.L);
}
}
void signal(semaphore S) { // 相当于释放资源
S.value++;
if(S.value <= 0){
remove a process P from S.L;
wakeup(P);
}
}
S.value < 0, 表示该类资源已分配完,因此进程调用 block 原语,进行自我阻塞,放弃处理机,并插入该类资源的等待队列 S.L. 遵循 “让权等待” 准则
若 S.value 加 1,后,仍然 <= 0, 表示 S.L 中仍有等待该资源的进程被阻塞,故还应调用 wakeup 原语,将 S.L 中的第一个等待进程唤醒。
利用信号量实现同步
S 初始值为 0,$P_2$ 等待 $P_1$ 的结果, $P_2$ 先执行 P(S) , S 为 0,执行 P 操作会把进程 $P_2$ 阻塞,并放入阻塞队列;当进程 $P_1$ 得出结果,执行 V 操作,把 $P_2$ 从 阻塞队列中放回就绪队列,当 $P_2$ 得到处理机时,就得以继续执行。
利用信号量实现进程互斥
S 初始值为 1,临界区无进程,进程执行 P 操作,把 S 减为 0,然后进入临界区;临界区有进程,S 为 0,再有进程执行 P 操作将会被阻塞。
- 在同步问题中,若某个行为要用到某种资源,则在这个行为前面 P 这种资源一下;若某个行为会提供某种资源,则在这个行为后面 V 这种资源一下。
- 在互斥问题中,P 、V 操作要紧夹使用互斥资源的那个行为,中间不能有其他冗余代码。
利用信号量实现前驱关系
分析进程同步和互斥问题的方法步骤
- 关系分析
- 整理思路
- 设置信号量
管程
- 管程是由一组数据及定义在这组数据之上的对这组数据的操作组成的软件模块,这组操作能初始化并改变管程中的数据和同步进程。
- 组成,类似面向对象中的一个抽象类
- 局部于管程的共享数据结构数据说明
- 对该数据结构进行操作的一组过程
- 对局部与管程的共享数据设置初始值的语句
- 基本特性
- 局部于管程的数据只能被局部于过程内的过程所访问
- 一个进程只有通过调用管程内的过程才能进入管程访问共享数据
- 每次仅允许一个进程在管程内执行某个内部过程
死锁
三、内存管理
概念
虚拟内存管理
四、文件管理
Intro
文件系统实现
磁盘组织与管理
五、输入/输出(I/O)管理
Intro
I/O 核心子系统
Computer Network
大纲
[考查目标]
1。掌握计算机网络的基本概念、基本原理和基本方法。
2。掌握计算机网络的体系结构和典型网络协议,了解典型网络设备的组成和特点,理
解典型网络设备的工作原理。
3。能够运用计算机网络的基本概念、基本原理和基本方法进行网络系统的分析、设计
和应用。
一、计算机网络体系结构
(一)计算机网络概述
1。计算机网络的概念、组成与功能
2。计算机网络的分类
3。计算机网络的标准化工作及相关组织
(二)计算机网络体系结构与参考模型
1。计算机网络分层结构
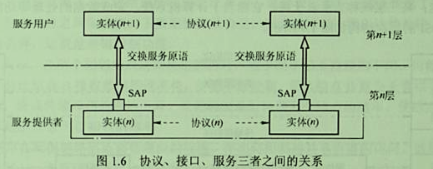
2。计算机网络协议、接口、服务等概念
3.ISO/OSI 参考模型和 TCP/IP 模型
二、物理层
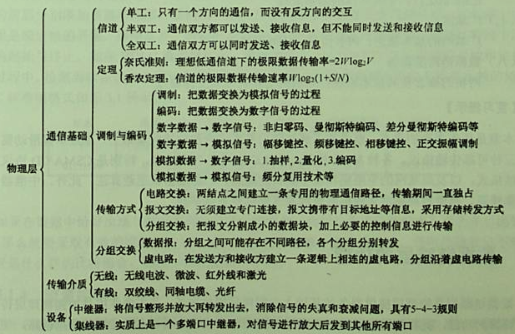
(一)通信基础
1。信道、信号、宽带、码元、波特、速率、信源与信宿等基本概念
2。奈奎斯特定理与香农定理
3。编码与调制
4。电路交换、报文交换与分组交换
5。数据报与虚电路
(二)传输介质
1。双绞线、同轴电缆、光纤与无线传输介质
2。物理层接口的特性
(三)物理层设备
1。中继器
2。集线器
三、数据链路层
(一)数据链路层的功能
(二)组帧
(三)差错控制
1。检错编码
2。纠错编码
(四)流量控制与可靠传输机制
1。流量控制、可靠传输与滑轮窗口机制
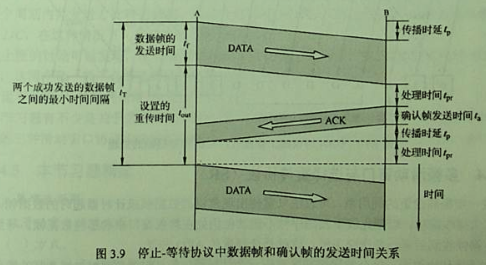
2。停止-等待协议
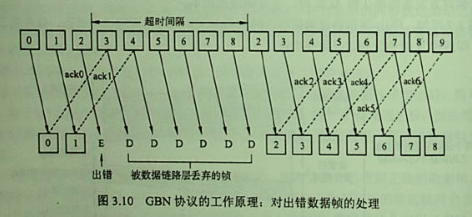
3。后退 N 帧协议(GBN)
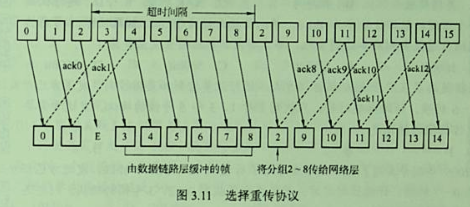
4。选择重传协议(SR)
(五)介质访问控制
1。信道划分
频分多路复用、时分多路复用、波分多路复用、码分多路复用的概念和基本原理。
2。随即访问
ALOHA 协议;CSMA 协议;CSMA/CD 协议;CSMA/CA 协议。
3。轮询访问
令牌传递协议
(六)局域网
1。局域网的基本概念与体系结构
2。以太网与 IEEE 802.3
3.IEEE 802.11
4。令牌环网的基本原理
(七)广域网
1。广域网的基本概念
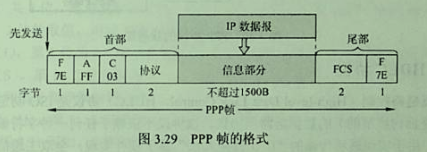
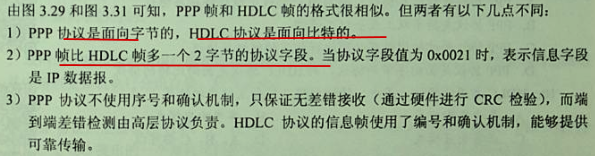
2.PPP 协议
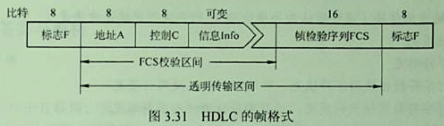
3.HDLC 协议
(八)数据链路层设备
1。网桥的概念和基本原理
2。局域网交换机及其工作原理。
四、网络层
(一)网络层的功能
1。异构网络互联
2。路由与转发
3。拥塞控制
(二)路由算法
1。静态路由与动态路由
2。距离-向量路由算法
3。链路状态路由算法
4。层次路由
(三)IPv4
1.IPv4 分组
2.IPv4 地址与 NAT
3。子网划分与子网掩码、CIDR
4.ARP 协议、DHCP 协议与 ICMP 协议
(四)IPv6
1.IPv6 的主要特点
2.IPv6 地址
(五)路由协议
1。自治系统
2。域内路由与域间路由
3.RIP 路由协议
4.OSPF 路由协议
5.BGP 路由协议
(六)IP 组播
1。组播的概念
2.IP 组播地址
(七)移动 IP
1。移动 IP 的概念
2。移动 IP 的通信过程
(八)网络层设备
1。路由器的组成和功能
2。路由表与路由转发
五、传输层
(一)传输层提供的服务
1。传输层的功能
2。传输层寻址与端口
3。无连接服务与面向连接服务
(二)UDP 协议
1.UDP 数据报
2.UDP 校验
(三)TCP 协议
1.TCP 段
2.TCP 连接管理
3.TCP 可靠传输
4.TCP 流量控制与拥塞控制
六、应用层
(一)网络应用模型
1。客户/服务器模型
2.P2P 模型
(二)DNS 系统
1。层次域名空间
2。域名服务器
3。域名解析过程
(三)FTP
1.FTP 协议的工作原理
2。控制连接与数据连接
(四)电子邮件
1。电子邮件系统的组成结构
2。电子邮件格式与 MIME
3.SMTP 协议与 POP3 协议
(五)WWW
1.WWW 的概念与组成结构
2.HTTP 协议
一、计算机网络体系结构
概述
计算机网络是一些互联的、自治的计算机系统的集合.
二、物理层
通信基础
基本概念
数据:传送信息的实体
信号:数据的电器或电磁表现,是数据在传输过程中的存在形式,有模拟信号和数字信号两种形式,传输方式有串行传输和并行传输两种方式。
码元,用一个固定时长的信号波形(数字脉冲)表示一位 k 进制数字,是数字通信中数字信号的计量单位。
一个数据通信系统主要划分为信源、信道和信宿三部分。
- 信道有基带信道和宽带信道 及 无线信道和有线信道之分
- 交互方式:单工、半双攻、全双工
- 信道的极限容量是指信道的最高码元传输速率或信道的极限信息传输速率
速率,单位时间内传输的数据量
码元传输速率,码元速率,波形速率
单位是波特(Baud),码元速率与进制无关
信息传输速率,信息速率,比特率
单位是比特/秒 , b/s
奈奎斯特 (Nyquist) 定理
- 理想低通信道下的极限数据传输率 = $2Wlog_2V$,单位 b/s.
- W 为理想低通信道的带宽,单位为 Hz
- V 为每个码元离散电平的数目。如16种码元需要 4 位二进制位。
- 结论:
- 任何信道,码元传输的速率是有上限的。
- 信道的频带越宽,就可用更高的速率进行码元的有效传输
- 给出了码元传输速率的限制,但没有给出信息传输速率的限制
香农定理
- 信号的极限数据传输率 = $Wlog_2(1+S/N)$,单位 b/s.
- W 为信道的带宽
- S 为信道所传输信号的平均功率
- N 为信道内部的高斯噪声功率。 S/N 为信噪比, 信噪比 = $10log_{10}(S/N)$,单位 dB。如S/N=10 时,信噪比为 10 dB, S/N = 1000时,信噪比为 30dB.
- 结论
- 信道的带宽或信道的信噪比越大,信息的极限传输速率越高。
- 对一定的传输带宽和一定的信噪比,信息传输速率的上限是确定的。
- 只要信息的传输速率低于信道的极限传输速率,就能找到某种方法来实现无差错的传输。
- 实际信道能达到的传输速率要低很多
- 表明,一个码元对应的二进制位数是有限的。
编码与调制
调制指把数据变换为模拟信号的过程;编码指把数据变换为数字信号的过程。
数字数据编码为数字信号,数字发送器
用于基带传输,
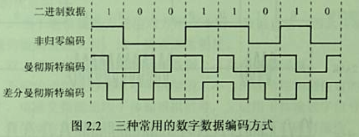
- 非归零编码
- 曼彻斯特编码,Manchester Encoding
- 每个码元中间出现电平跳变
- 所占频带宽度是原始基带宽度的两倍
- 用于以太网
- 差分曼彻斯特编码
- 4B/5B编码
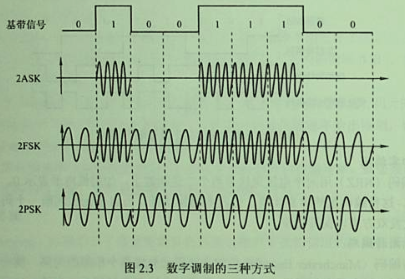
数字数据调制为模拟信号,调制器
调制方法有:
幅移键控(ASK),振幅
频移键控(FSK), 频率
相移键控(PSK),相位
正交振幅调制(QAM),ASK 与 PSK的结合
模拟数据编码为数字信号,PCM编码器
常用于对音频信号进行编码的脉码调制(PCM)。包括三个步骤:采样、量化和编码。
采样定理:
- $f_{采样}$必须大于等于最大频率$f$的两倍
- 又称奈奎斯特定理
模拟数据调制为模拟信号,放大器调制器
电路交换、报文交换与分组交换
电路交换
- 三个阶段:连接建立,数据传输,连接释放
- 优点:通信时延小,有序传输,没有冲突,使用范围广,实时性强,控制简单
- 缺点:建立连接时间长,线路独占,灵活性差,难以规格化
- 适于数据量很大且传送时间远大于呼叫时间
报文交换
- 优点:无需建立连接,动态分配线路,提高线路可靠性,提高线路利用率,提高多目标服务
- 缺点:存在转发延迟,要求网络节点有较大缓存空间
分组交换
较先进,解决大报文传输的问题
- 优点:无建立时延,线路利用率高,简化了存储管理,加速传输,减少了出错率和重发数据量
- 缺点:存在传输时延,需要传输额外的信息量,需对分组按编号进行排序(若采用虚电路,但有呼叫建立,数据传输和虚电路释放三个过程)
- 适于计算机之间的突发式数据通信
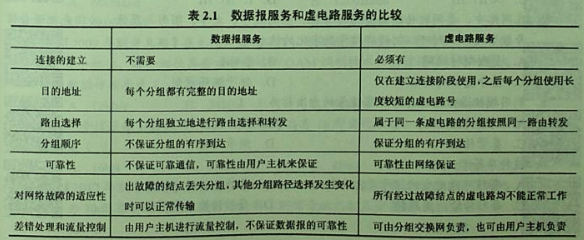
数据报与虚电路
面向连接的虚电路方式 和 无连接的数据报方式是分组交换的两种方式,都由网络层提供。
数据报,存储转发
虚电路
- 将数据报方式与电路交换方式结合起来,充分发挥两种方法的优点。
- 三个阶段:呼叫建立,数据传输和虚电路释放
- 连接一旦建立,就固定了虚电路所对应的物理路径
- 电路并不是 专用的,
比较
传输介质
双绞线
- 减少相邻导线的电磁干扰
- 绞合
- 外面加上一个金属丝编织成的屏蔽网,屏蔽双绞线(STP),非屏蔽双绞线(UTP)
- 通信距离 几千米到数十千米,太远时,模拟传输,用放大器放大衰减的信号;数字传输,用中继器将失真信的信号整形。
- 带宽取决于铜线的粗细和传输的距离
同轴电缆
光纤
- 利用光导纤维传递光脉冲来进行通信,带宽范围极大
- 组成:线心和包层
- 多模光纤,从不同角度入射的多束光线可在一条光纤中传输,
- 光源:发光二极管
- 会逐渐展宽,造成失真,只适合近距离传输
- 单模光纤,光纤直径减小到仅一个光波长度时,不会产生多次反射。
- 直径只有几微米,成本高
- 光源:定向性很好的激光二极管
- 衰减小,适合远距离传输
无线传输介质
- 无线电波,传输距离长,向所有方向传播
- 微波、红外线和激光
- 高带宽无线通信,
- 直线传播,又称视线介质,传输距离有限,需借助中继站来接力,如卫星。
- 卫星通信,通信容量大,距离远,覆盖广,缺点是端到端传播时延长。
物理层的接口特性
- 机械特性,规定物理连接时所采用的规格、引线的数目、引脚的数量和排列情况等
- 电气特性,规定传输二进制位时,线路上信号的电压高低、阻抗匹配、传输速率和距离限制等。
- 功能特性,某一电压表示意义,接口部件的信号线(数据线,定时线)的用途
- 规程特性,定义个物理线路的工作规程和时序关系。
物理层设备
- 中继器,又称转发器
- 将信号整形并放大再转发出去
- 使用中继器连接的几个网段仍然是一个局域网,
- 工作在物理层,不能连接两个具有不同速率的局域网,没有存储转发功能,两端网段必须使用同一个协议。
- 放大器放大模拟信号(将信号放大),中继器放大数字信号(信号整形再生)
- 集线器 Hub
- 多端口中继器,工作在物理层
- 扩大网络传输范围,
- 主要使用双绞线组建共享网络
- 只能工作在半双工状态
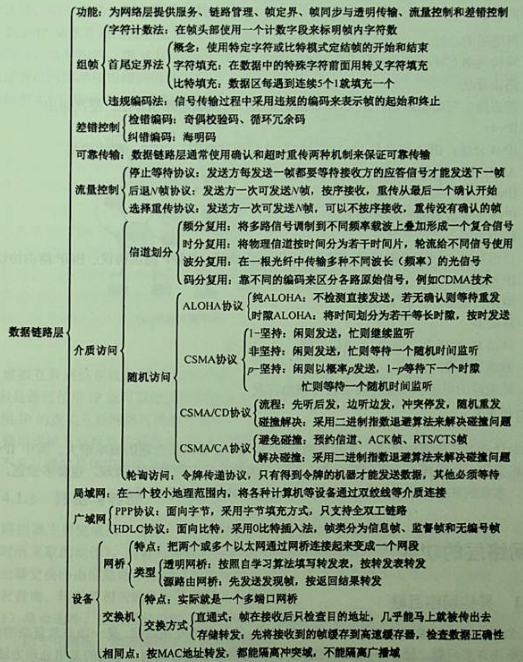
三、数据链路层
本章是历年考察重点,研究的是 “点到点” 之间的通信。
功能
主要作用是加强物理层传输原始比特流的功能,将物理层提供的可能出错的物理连接改造为逻辑上无差错的数据链路,使之对网络层表现为一条无差错的链路。
为网络层提供服务
- 无确认的无连接服务,适用于实时通信 或 误码率较低的通信信道,如以太网
- 有确认的无连接服务,适用于误码率较高的通信信道,如无线通信
- 有确认的面向连接服务,适用于通信要求(可靠性、实时性)较高的场合。有连接就一定有确认。
链路管理
- 帧定界、帧同步与透明传输,HDLC通信中,用标识位 F(01111110)来标识帧的开始和结束。
- 流量控制,限制发送方的数据流量,使其发送速率不超过接收方的接收能力。
- 差错控制
- 位错,CRC检错,ARQ重传出错帧
- 帧错,引入定时器和编号机制
组帧
组帧主要解决帧定界、帧同步、透明传输等问题。网络信息传输的最小单位是 帧。
- 字符计数法,帧头设置计数字段。
- 字符填充的首尾定界符法,使用特殊字符:开始(DLE STX)结束(DLE ETX).
- 比特填充的首尾标志法,使用 01111110标志开始和结束。容易由硬件实现,性能优于字符填充.常用。
- 违规编码法,借用违规编码序列定始终。如局域网IEEE 802。只适用于采用冗余编码的特殊编码环境,常用。
差错控制
- 检错编码
- 纠错编码
流量控制与可靠传输机制
流量控制、可靠传输 与 滑动窗口机制
流量控制的基本方法是由接收方控制发送方发送数据的速率,常见方式有:停止-等待协议和滑动窗口协议。
单帧滑动窗口 与 停止-等待协议
- 用 1 bit 对帧编号
- 每发送一个数据帧就停止并等待。
多帧滑动窗口 与 后退 N 帧协议(GBN)
多帧滑动窗口 与选择重传协议(SR)
只重传出现差错的数据帧或计时器超时的数据帧
更有效的差错处理策略,一旦接收方怀疑帧出错,就会发送一个否定帧 NAK给发送方,重传。
窗口需满足: $W_R+W_T\le 2^n \quad,W_R\le 2^{n-1}\le W_T$
接受窗口为最大值时,$W{Tmax}=W{Rmax}=2^{n-1}\quad,一般地 W_T = W_R$
- 信道效率,也称信道利用率,从时间角度的定义:信道效率是对发送方而言的,是指发送方在一个发送周期的时间内,有效地发送数据所需要的时间占整个发送周期的比率。
- 信道吞吐率 = 信道利用率 x 发送方的发送速率。
介质访问控制,
MAC子层,任务是为使用介质的每个结点 隔离 来自同一信道上其它结点所传送的信号,决定广播信道中信道分配。
信道划分介质访问控制
信道划分实质就是通过分时,分频,分码等方法把原来的一条广播信道,逻辑上分为几条用于两个结点之间通信的互不干扰的子信道,实际上就是把广播信道转变为点对点信道。
- 频分多路复用(FDM),静态
- 相邻信道之家需加入“保护频带”,防止信道间相互干扰
- 充分利用传输介质的带宽,系统效率较高;技术成熟,容易实现
- 共享时间,而不共享空间
- 时分多路复用(TDM),静态
- 一条物理信道按时间片 轮流地分配给多个信号使用。
- 统计时分多路复用(STDM,又称异步时分多路复用)是TDM的一种改进,采用STDM帧,不固定分配时隙,而按需动态地分配时隙。可相对提高线路的利用率。
- 共享空间,而不共享时间
- 波分多路复用(WDM),动态
- 即光的频分多路复用,波长分解复用器
- 即共享空间,又共享时间。黄豆与绿豆在同一辆车运送,到达 C 站后再分开。
- 码分多路复用(CDM),动态
- 采用不同编码。即共享信道的频率,又共享时间。
- 合波器,分波器
- 码分多址(CDMA),一种方式。码片(Chip)
- 频谱利用率高、抗干扰能力强、语音质量好等优点,还可以减少投资和降低运行成本,主要用于无线通信系统,特别是移动通信系统。
随机访问介质访问控制
info
- 解决随机接入发生的碰撞,每个用户需要按照一定的规则反复地重传它的帧,直到无碰撞地通过。
- 常用协议核心思想都是:胜利者通过争用获得信道,从而获得信息的发送权,因此,随机访问介质控制协议又称 争用协议。
- 是一种将广播信道转化为点到点信道的行为。
ALOHA协议, Additive Link On-line HAwaii system.
- 纯ALOHA协议
- 重传策略,让各站等待一段随机的时间,直到重传成功。
- 吞吐量 $S=Ge^{-2G},\quad G为网络负载$
- 时隙ALOHA协议
- 规定只能在每个时隙开始时才能发送一个帧
- $S=Ge^{-G}$,比纯ALOHA网络的吞吐量大了 1 倍。
CSMA协议,载波侦听多路访问(Carrier Sense Multiple Access, CSMA)

1-坚持 CSMA
侦听到信道忙后,继续坚持侦听信道;侦听到信道空闲后,发送帧的概率为 1。
非坚持CSMA
如果信道忙,那么放弃侦听,等待一个随机的时间再继续侦听,若空闲,立即发送。
p-坚持CSMA
- 用于时分信道
- 若忙,等待下一个时隙再侦听;若空闲,以概率 p 发送数据,以概率 1-p 推迟到下一个时隙
CSMA/CD 协议,载波侦听多路访问/碰撞检测(CSMA with Collision Detection)
- 适用于总线形网络或半双工网络环境
- 碰撞检测,就是边发送边侦听
- 工作流程可简单概括为:先听后发,边听边发,冲突停发,随机重发。
- 传输拥塞信号后,适配器采用 截断二进制指数退避算法 等待一段随机事件
- 总线的传播时延对 CSMA/CD的影响很大,采用CSMA/CD协议的以太网不可能进行全双工通信,只能进行半双工通信。
- 设$\tau$为单程传播时延,以太网端到端往返时间$2\tau$为争用期,(又称冲突窗口或碰撞窗口)
- 最小帧长 = 总线传播时延 x 数据传输率 x 2
CSMA/CA 协议,载波侦听多路访问/碰撞避免(CSMA with Collision Avoidance)
- CSMA/CD协议已成功应用于使用有线连接的局域网,CSMA/CA应用于无线网
- 采用二进制指数退避算法,当且仅当检测到信道空闲且这个数据帧是要发送的第一个数据帧时,才不使用退避算法
- 三种机制来实现碰撞避免
- 预约信道
- ACK帧
- RTS/CTS 帧,可选,主要用于解决无线网中的 “隐蔽站” 问题
轮询访问介质访问控制
局域网
要熟悉局域网的各种协议.
基本概念和体系结构
特点
- 为一个单位所拥有,且地理范围和站点数目均有限
- 所有站点共享较高的总带宽(即较高的数据传输率)
- 较低的时延和较低的误码率
- 各站为平等关系而非主从关系
- 能进行广播和组播
局域网的特性主要由三个要素决定
三种特殊的局域网拓扑实现
- 以太网(使用范围最广),逻辑拓扑是总线形结构,物理拓扑是星形或拓展星形结构
- 令牌环(Token Ring,IEEE 802.5),逻辑拓扑是环形结构,物理拓扑是星形结构
- FDDI(光纤分布数字接口,IEEE 802.8),逻辑拓扑是环形结构,物理拓扑是双环结构
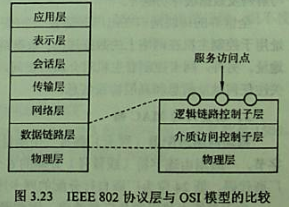
IEEE 802
- 局域网参考模型只对应与OSI的数据链路层和物理层
- 由于以太网的垄断地位,几乎成为局域网的代名词,802 LLC子层作用已经不大,现在许多网卡仅装有 MAC 协议而没有 LLC 协议。
- 逻辑链路控制(LLC)子层
- 向网路层提供无确认无连接、带确认无连接、面向连接、高速传送服务
- 媒体介入控制(MAC)子层
以太网 与 IEEE 802.3
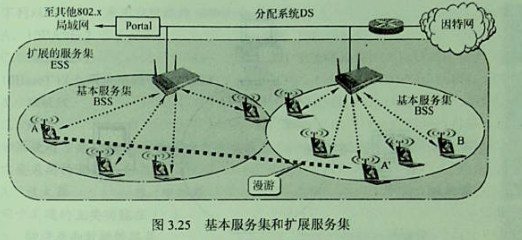
IEEE 802.11
- 是无线局域网的一系列协议标准
- 采用CAMA/CA协议
- 有固定基础设施无线局域网
- 基本服务及(Basic Service Set, BSS),一个基站(接入点Access Point, AP,作用和网桥类似),若干移动站。
- 主干分配系统(Distribution System, DS)
- 扩展的服务集(Extended Service Set, ESS),可通过门桥(Portal,作用相当于网桥)为无线用户提高到非 802.11 无线局域网的接入
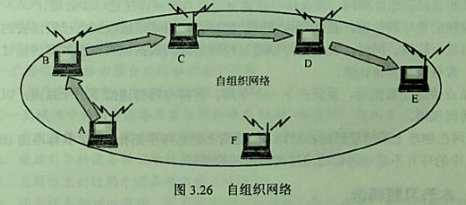
- 无固定基础设施无线局域网自组织网络
- 没有接入点(AP)
- 与移动IP并不相同
- 具有自己特定的路由选择协议,可以不和因特网相连
令牌环网的基本原理
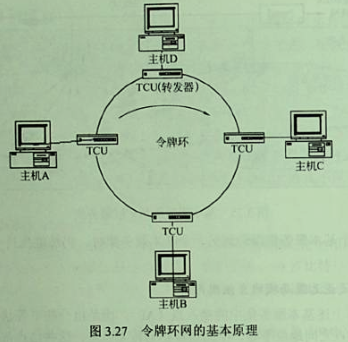
- 物理上采用星形拓扑结构,逻辑上仍是环形拓扑结构,其标准由IEEE 802.5 定义。
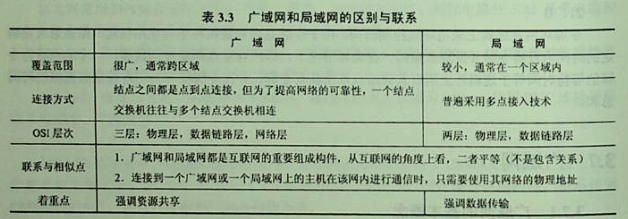
广域网
数据链路层设备
网桥的概念及其基本原理
- Intro
- 网桥工作在链路层的 MAC 子层,可以使以太网各网段成为隔离开的碰撞域
- 网桥处理数据的对象是帧,中继器、放大器处理数据的对象是信号,所以它们是工作在物理层 的设备。
- 网桥的基本特点,见书。
- 网桥的优缺点,见书。
- 透明网桥(选择的不是最佳路由)
- 源路由网桥(选择的是最佳路由)
- 两种网桥的比较
局域网交换机及其工作原理
- 局域网交换机
- 工作在数据链路层
- 虚拟局域网(Virtual LAN,VLAN)不仅可以隔离冲突域,而且可以隔离广播域
- 原理
- 特点,见书
- 两种交换模式
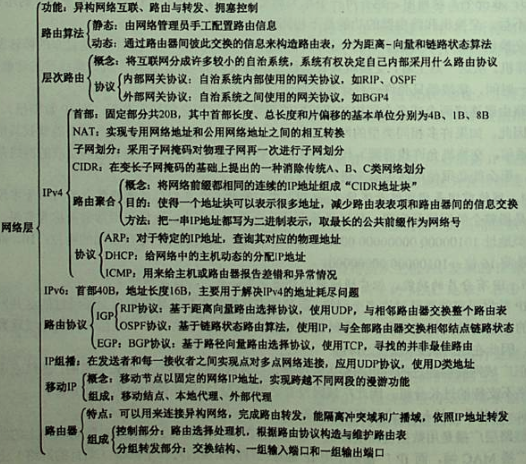
四、网络层
功能
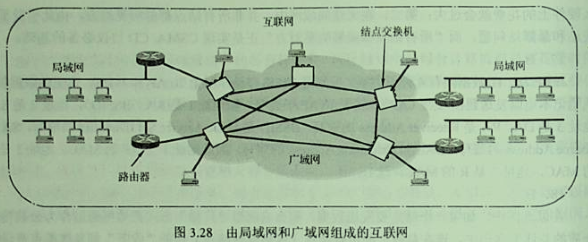
- 异构网络互联
- 网络互联通常是指用路由器进行网络互联和路由选择
- 虚拟互联网络也就是逻辑互联网络,可简称为 IP网络
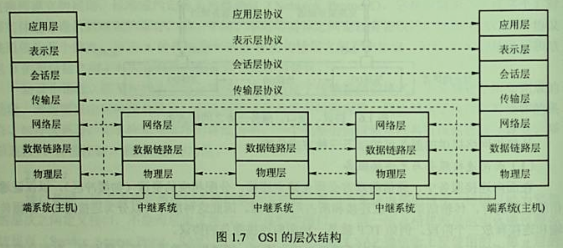
- 中间设备,中间系统,中继系统
- 物理层:中继器,集线器(Hub)
- 数据链路层中继系统:网桥或交换机
- 网络层:路由器
- 网络层以上:网关
- 路由与转发
- 路由选择,路由选择协议,生成路由表
- 分组转发,转发表由路由表得出。
- 拥塞控制
- 随着网络负载的增加,网络吞吐量可能进入的状态:轻度拥塞,拥塞,死锁
- 作用是确保子网能够承载所达到的流量,这是一个全局性的过程,涉及网络中所有主机、路由器及导致网络传输能力下降的所有因素。
- 方法
- 开环控制,静态预防方法,在做决定时不考虑当前网络的状态
- 闭环控制,动态方法,基于反馈环路的概念
路由算法
静态路由与动态路由
常见的动态路由算法分两类:距离-向量路由算法 和 链路状态路由算法
距离-向量路由算法
- 常见算法是 RIP算法,它采用 “条数” 作为距离的度量
- 最短(最小代价)通路
链路状态路由算法
- 典型算法是 OSPF算法
- Dijsktra最短路径算法计算路由
层次路由
IPv4
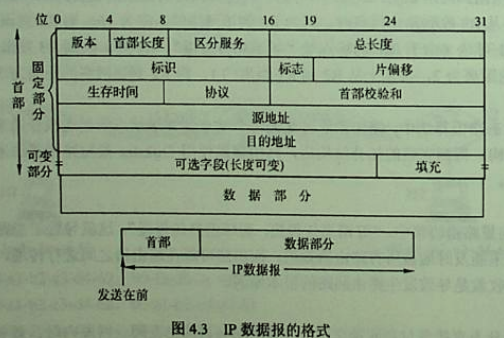
IPv4分组
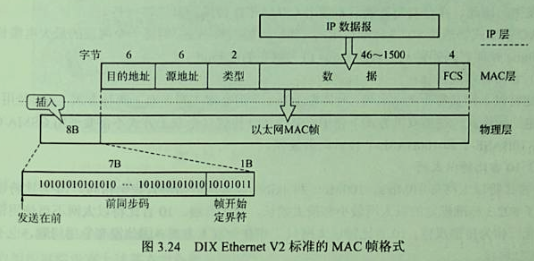
IPv4分组的格式
- 固定部分为 20 B.
- 首部长度,总长度,片偏移的单位分别为 4B, 1B, 8B
- fields
- 首部长度,16位,指首部和数据之和的长度,单位字节,最大长度 65535B.以太网帧的最大传输单元(MTU)为1500B.
- 标识,16位,计数器,每产生一个数据报就加 1,分片的多个数据报标识相同。
- 标志,3位,最低位 MF: 1 表示还有分片 0 表示最后一个分片。中间位 DF:为 0 时才允许分片。
- 片偏移,13位,分片后,某片在原分组中的相对位置。单位 8 B,即分片长度为 8B(64位)的整数倍
- 生存时间(TTL),8位,数据报在网络中可通过的路由器数的最大值。
- 协议,6为TCP,17为UDP
IP数据报分片
- 目的主机使用 IP 首部中的标识、标志和片偏移字段来完成对片的重组。
网络层转发分组的流程
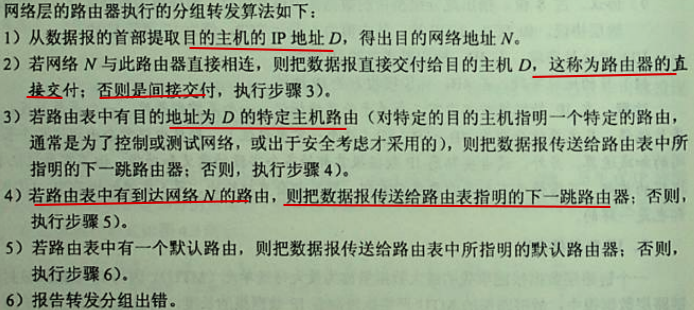
- 将 IP 地址转换成 MAC 地址,将其放到 MAC 帧首部中,然后根据这个 MAC 地址找到下一条路由器。
- 不同网络中传送时,MAC帧中的源地址和目的地址要发生变化
- 网桥在转发帧时,不改变帧的源地址。
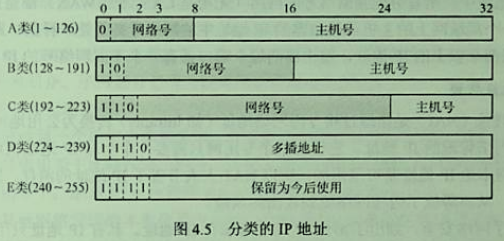
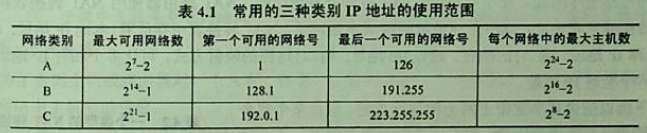
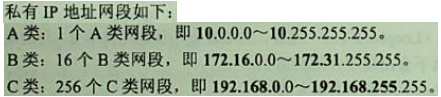
IPv4地址与NAT
子网划分与子网掩码、CIDR
ARP、DHCP与ICMP
IP地址与硬件地址
- IP分组在每个网络中都被路由器解封装和重新封装,其数据链路层封装所使用的MAC地址是不断改变的,这也决定了无法使用MAC地址跨网络通信。
地址解析协议(Address Resolution Protocol, ARP)
- 完成 IP 地址到 MAC 地址的映射
- 每台主机都设有一个 ARP 高速缓冲,用来存放本局域网上各主机和路由器的 IP 地址和 MAC 地址的映射表,称 ARP 映射表,使用 ARP 来动态维护。
- ARP “看到了” IP地址 工作在网络层,NAT路由器 “看到了” 端口 工作在传输层。
- 使用目的MAC地址为 FF-FF-FF-FF-FF-FF的帧广播
动态主机配置协议(Dynamic Host Configuration Protocol, DHCP)
- 常用于给主机动态地分配 IP 地址,
- 应用层协议,基于 UDP
- 工作原理
- 客户/服务器方式
- DHCP服务器的回答报文称为提供报文
- DHCP发现消息 - DHCP提供消息 - DHCP请求消息 - DHCP确认消息
- 租用期
网际控制报文协议(Internet Control Message Protocol, ICMP)
让主机或路由器报告差错和异常情况
IPv6
- IPv6的主要特点
- IPv6地址
- 每 4 位用一个十六进制数表示,并用冒号分隔每 16 位
路由协议
自治系统(Autonomous System, AS)
域内路由与域间路由
- 内部网关协议(Interior Gateway Protocol, IGP)
- 外部网关协议(External Gateway Protocol, EGP)
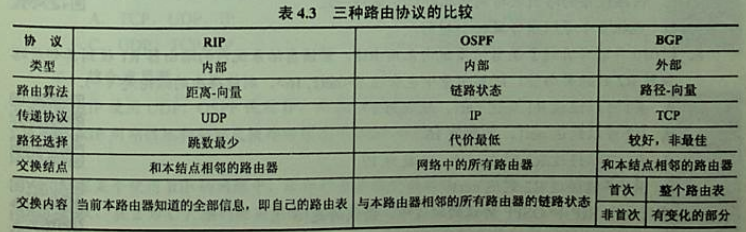
路由信息协议(Routing Information Protocol, RIP)
RIP 是一种分布式的基于距离向量的路由选择协议,最大优点就是简单。
- RIP规定
- 距离向量,跳数
- 距离等 16,表示网络不可达,因而 RIP 只适合小型互联网
- RIP的特点(注意与OSPF的特点比较)
- 仅和相邻路由器交换信息
- RIP 收敛
- RIP是应用层协议,使用UDP传送数据(端口520)。
- 距离向量算法
- 每个路由表项: <目的网络 N, 距离 d, 下一跳路由器 X>
- RIP 默认超时时间为 180 s.
- 步骤见书 P178
开发最短路径优先(OSPF)协议
使用分布式链路状态路由算法.
- OSPF协议的基本特点
- 洪泛法
- “链路状态” 说明本路由器和哪些路由器相邻及该链路的 “度量”(或代价)
- 只有当链路状态发生变化时,路由器才用洪泛法向所有路由器发送此信息。
- OSPF是网络层协议,直接使用 IP 数据报传送(其 IP 数据报首部的协议字段为 89)
- 根据 IP 分组的不同服务类型(TOS)而设置成不同的代价。
- 多路径间的负载平衡
- 每个链路状态都有一个 32 的序号,序号越大,状态就越新。
- OSPF的基本工作原理
- 链路状态数据库,即全网的拓扑结构图,在全网内是一致的。
- 每个路径根据该全网拓扑结构图,使用 Dijkstra 最短路径算法计算最优路径以构造路由表。路由表只存储 “下一跳”
- 区域,将利用洪泛法交换链路状态信息的范围局限于每个区域而非整个自治系统,减少了这个网络上的通信量。主干区域。
- OSPF的五种分组类型
- 问候分组
- 数据库描述分组
- 链路状态请求分组
- 链路状态更新分组
- 链路状态确认分组
边界网关协议(Border Gateway Protocol, BGP)
- Intro
- BGP 是不同自治系统的路由器之间交换路由信息的协议,是一种外部网关协议。
- 常用于互联网的网关之间
- 路由表包含,1)已知路由器的列表 2)路由器能达到的地址及到达每个路由器的路径的跳数
- BGP 只能力求寻找一条能够到达目的网络且比较好的路由,而非寻找一条最佳路由。
- 采用路径向量路由选择协议,应用层协议,基于 TCP
- 工作原理
- BGP 所交换的网络可达性信息就是要到达某个网络所要经过的一系列 AS.
- BGP 支持 CIDR, 路由表项包括目前的网络前缀、下一跳路由器,以及到达该目的网络所要经过的各个自治系统序列
- BGP-4使用 4 中报文
- 打开(Open)报文
- 更新(Update)报文
- 保活(Keepalive)报文
- 通知(Notification)报文
IP组播
- 组播的概念
- 组播机制是为了能够支持像视频点播和视频会议这样的多媒体应用
- 仅应用于 UDP
- 组播地址表示一组地址,在 D 类地址空间空分配。
- 主机使用一个称为 IGMP(因特网组管理协议)的协议加入组播组。
- 组播需要路由器的支持才能实现,组播路由器。
- IP组播地址
- D 类地址范围是 224.0.0.0 - 239.255.255.255,一个 D 类 IP 地址标志一个组播组。
- 组播数据报,首部中协议字段值是 2. 表明使用 IGMP.
- IP 组播分为两种
- 只在本局域网上进行硬件组播
- 在因特网的范围内进行组播
- 组播 IP 地址与以太网硬件地址的映射关系不是唯一的。
- IGMP与组播路由算法
- 因特网组管理协议(Internet Group Management Protocol, IGMP),使路由器知道组播成员的信息
- 组播路由选择协议
- 组播路由选择实际上就是要找出以源主机为根节点的组播转发树,
- IGMP 让连接到本地局域网上的组播路由器知道本局域网上是否有主机参加或退出了某个组播组。
移动IP
- 移动 IP 的概念
- 移动 IP,支持移动性的因特网体系结构与协议;
- 区别与移动自网络
- 区别与动态 IP
- 移动 IP 通信过程
网络层设备
- 路由器的组成和功能
- 任务是连接异构网络并完成路由转发
- 路由器隔离了广播域
- 结构:路由选择和分组转发;模型:路由器是网络层设备,实现下三层
- 存储转发设备
- 网桥实现了物理层和数据链路层,那么网桥可以互联两个物理层和数据链路层不同的网络
- 但中继器是直通式设备,实现物理层后,却不能互联两个物理层不同的网段。
- 路由选择处理机
- 分组转发:交换结构,一组输入端口,一组输出端口
- 路由表与路由转发
- 路由表项:目的网络 IP 地址、子网掩码、下一跳 IP 地址、接口
五、传输层
传输层提供的服务
传输层的功能
- 通信部分的最高层,用户功能的最低层
- 只有主机的协议栈才有传输层和应用层,而路由器只用到下三层
- 提供应用进程之间的逻辑通信(即端到端的通信),网络层提供的是主机间的逻辑通信
- 复用和分用,注意区别与网络层的 复用,分用
- 对收到的报文进行差错检测(首部和数据部分),网络层只检查 IP 数据报首部,不检查数据部分。
- 提供两种不同的传输协议, TCP(面向连接,虚电路) 和 UDP(无连接,数据报)
传输层的寻址与端口
端口是传输层的服务访问点(TSAP),标识主机应用进程,类似于 IP 和 MAC地址
是软件端口,区别与路由器或交换机上的硬件端口
端口号,长16 bite, 标识 65536个不同端口号
套接字
- 套接字 = (主机 IP 地址, 端口号),唯一标识网络中一台主机和其上的一个应用(进程)
- 在网络中采用发送方和接收方的套接字(Socket)组合来识别端点
无连接服务和面向连接服务
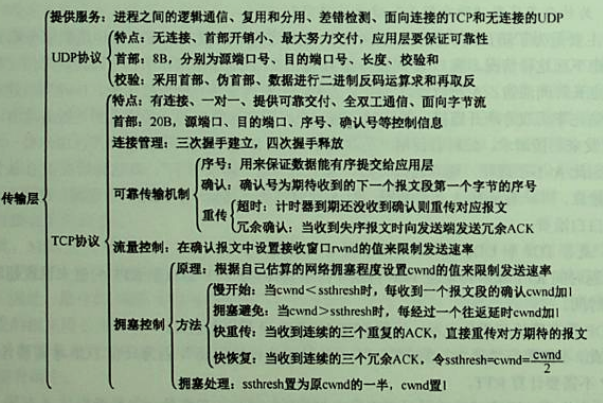
UDP 协议
UDP 数据报
- 概述
- 常用于一次性传输较少数据的网络应用
- 常用于多媒体应用(IP 电话、实时视频会议、流媒体等)
- 可靠数据传输相对实时性来说不重要
- 维护可靠性的工作需要用户在应用层完成
- UPD面向报文,一次交付一个完整的报文,报文不可分割,是 UDP 数据报处理的最小单位。
- 首部格式
- 两部分:UDP 首部(8B) 和用户数据
- 首部包含 4 个字段
- 源端口,不需要时可用全 0
- 目的端口
- 长度,最小是 8,仅有首部
- 校验和,可选,不需要,设全 0
- 接收方发现目的端口号不正确,丢弃报文,并由 ICMP 发送 “端口不可达” 差错报文给发送方
UDP 校验
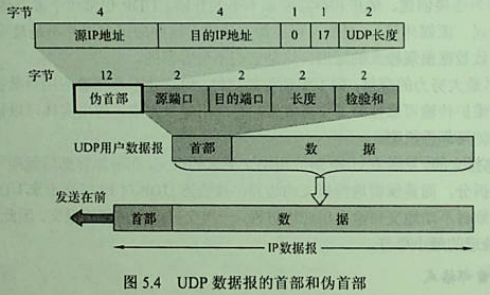
- 12B的伪首部仅为了计算校验和,即检查了UPD 数据报,又对 IP 数据报的源 IP 地址和目的 IP 地址进行了检验。
- UDP 校验和计算方法,二进制反码运算求和再取反。
- 若 UDP 数据报部分的长度不是偶数个字节,则需填入一个全 0 字节,该字节和伪首部一样,是不发送的。
- 检错能力并不强,却简单、处理速度快
TCP 协议
特点
- 主要解决传输的可靠、有序、无丢失和不重复问题
- 提供全双工通信,发送缓存和接受缓存
- 面向字节流,
TCP报文段
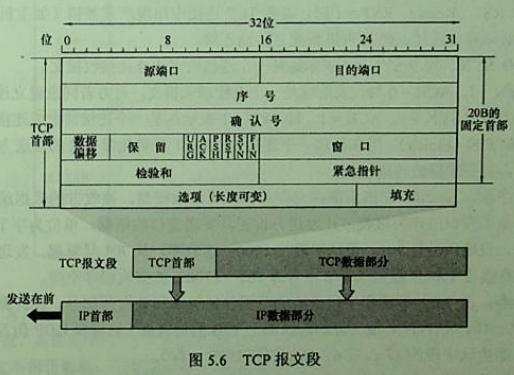
- TCP传送的数据单元称为报文段,分首部和数据两部分,首部最短 20 B,后面有 4N 字节是根据需要而增加选项,通常长度为 4B 的整数倍。
- TCP 报文段既可以用来运载数据,又可以用来建立连接、释放连接和应答
- 序号,4B,TCP是面向字节流一的(即 TCP 传送时是逐个字节传送的),所以 TCP 连接传送的数据流中的每个字节都编上一个序号。序号字段的值指的是本报文段所发送的数据的第一个字节的序号。
- 确认号,4B,是期望收到对方的下一个报文段的数据的第一个字节的序号
- 数据偏移,即首部长度,4位,单位是32位(4B),当该字段值为 15 时,达到 TCP 首部的最大长度 60B
- 保留字段,应置为 0
- 紧急位 1 URG,为 1,表示紧急指针字段有效,相当于高优先级的数据,需要和紧急指针配套使用,即数据从第一个自己到紧急指针所指字节就是紧急数据
- 确认位 2 ACK,为 1,表示确认号字段有效,为 0,则无效。TCP规定,在连接建立后所有传送的报文段都必须把 ACK 置 1.
- 推送位 3 PSH(Push),为 1,接受 TCP 尽快交付给接受应用进程,而不再等整个缓存都填满后再向上交付
- 复位位 4 RST(Reset),为 1,表明 TCP 连接出现严重差错,必须释放链接,然后再重新建立运输连接
- 同步位 5 SYN,为 1,表示这是一个连接请求(SYN=1; ACK=0)或连接接收报文(SYN=1; ACK=1)
- 终止位 6 FIN (Finish),为 1,表示数据发送完毕,并要求释放传输连接
- 窗口,2B,单位字节,指出现在允许对方发送的数据量
- 校验和,2B, 检验首部和数据,也要加上伪首部,只需将 UDP 伪首部的第 4 个字段,即协议字段的17 改成 6,其他和 UDP 一样。
- 紧急指针,16 位,指出本报文段中紧急数据公有多少字节
- 选项,长度可变,(Maximum Segment Size, MSS),MSS 是 TCP 报文段中数据字段的最大长度。
- 填充字段,使整个首部长度是 4B的整数倍。
TCP 连接管理
tips
- 每条 TCP 连接有两个端点,连接的端口称为 套接字(socket)或插口,唯一地被两个端点(即套接字)确定
- 连接的建立采用 客户/ 服务器 方式。
- 连接的三个阶段:连接的建立、数据传送和连接释放
TCP 连接的建立,3 次握手
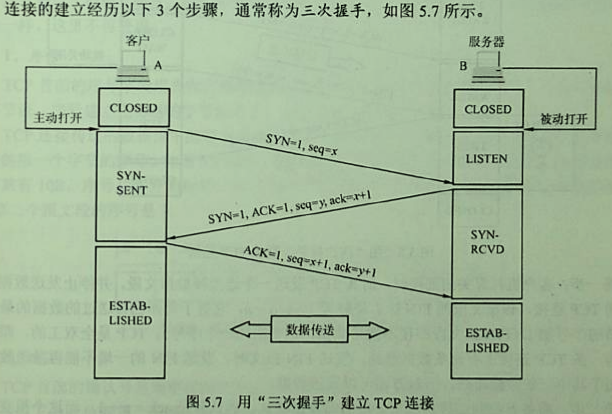
- 服务器端的资源是在完成第二次握手时分配的,客户端的资源是在完成第三次握手时分配的,这就使得服务器易于收到 SYN 洪泛攻击
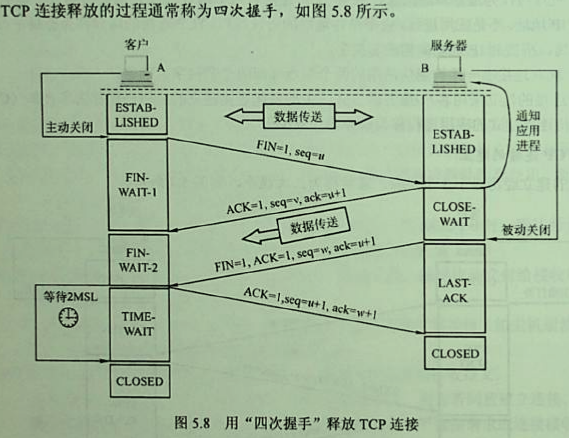
TCP 连接的释放,4 次握手
TCP 可靠传输
- 序号
- 确认,默认使用累计确认
- 重传,导致重传:
- 超时
- TCP 采用一种自适应算法计算超时计时器的重传时间
- $新RTT_S=(1-\alpha)\times(旧RTT_S)+\alpha\times(新RTT样本)$(Round-Trip Time, RTT)
- $0\le\alpha\lt1$,接近 0,表示新旧变化不大,RTT 值更新较慢;接近 1,旧的受新的影响较大,RTT值更新较快。
- 推荐值 0.125
- 超时重传时间(Retransmission Time-Out, RTO)
- $RTO = RTT_S+4\times RTT_D$
- $RTT_D$ 是 RTT的偏差的加权平均值,它与 $RTT_S$ 和新 RTT 样本之差有关。
- 第一次测量时, $RTT_D$取为测量到的 RTT 样本值得一半
- 之后,$新 RTT_D=(1-\beta)\times(旧RTT_D)+\beta\times|RTT_S - 新RTT样本|$
- 其中,$\beta$ 是个小于 1 的系数,推荐 0.25
- 冗余 ACK
- 超时触发重传存在的一个问题是超时周期旺旺太长
- 快速重传,冗余 ACK 就是再次确认某个报文段的 ACK,而发送方先前已经收到过该报文段的确认。
- 校验机制 ,与 UDP 校验一样
TCP 流量控制
- 基于滑动窗口协议
- 接受窗口,rwnd, 接收方通过调整 TCP 报文段首部中的 “窗口” 字段值来限制发送方发送速率
- 拥塞窗口,cwnd, 发送方根据其对当前网络拥塞程度的估计而确定的窗口值,其大小与网络的带宽和时延密切相关
- 发送方的发送窗口的实际大小取 rwnd 和 cwnd 中的最小值
- 传输层和数据链路层的流量控制的区别
- 传输层定义端到端用户之间的流量控制,数据链路层定义两个中间的相邻节点的流量控制
- 数据链路层的滑动窗口协议的窗口大小不能动态变化,传输层的则可以动态变化
TCP 拥塞控制
与流量控制的异同
- 相似之处,两者都通过控制发送数据的速率来达到控制效果
- 不同,拥塞控制是一个全局性的过程,涉及所有的主机、路由器 以及与降低网络传输性能有关的所有因素;流量控制往往是指点对点的通信量的控制,即接受端控制发送端
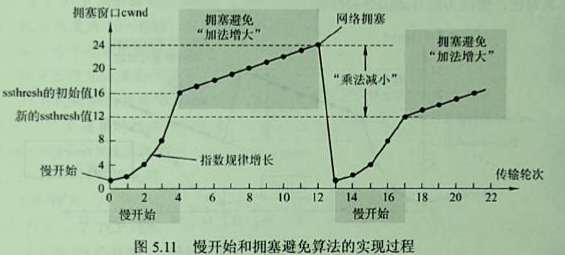
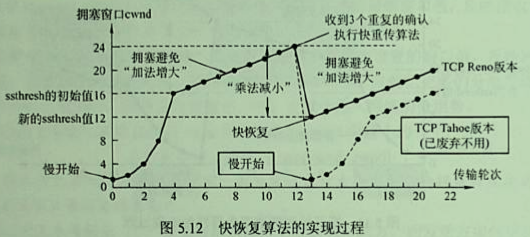
4 种算法:
六、应用层
Intro
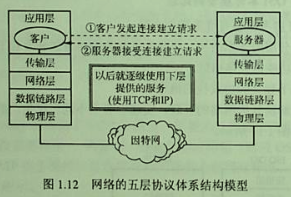
客户/服务器模型
常见应用包括Web、文件传输协议(FTP)、远程登录和电子邮件
P2P模型
- 任意一对计算机——称为对等方(Peer),流行的应用有PPlive、Bittorrent 和电驴等。
域名系统(DNS)
Intro
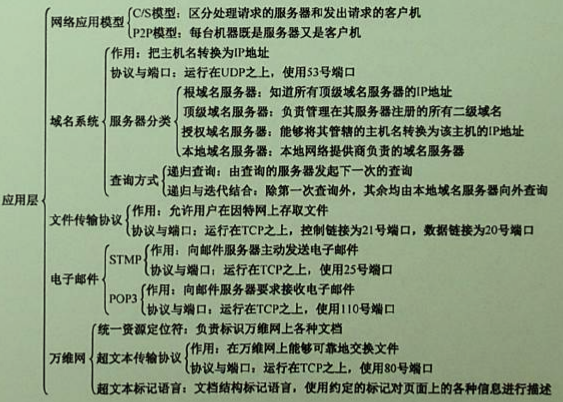
- 域名系统(Domain Name System, DNS),用来将便于记忆的主机名转换为便于机器处理的 IP 地址。
- 采用 C/S 模型,其协议运行在 UDP 之上,使用 53 号端口
层次域名空间
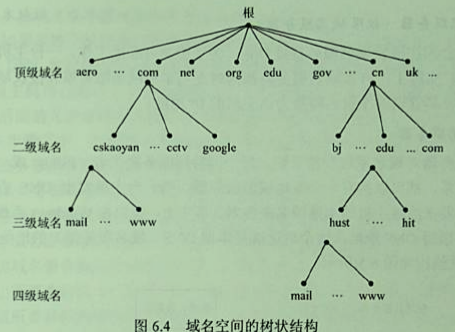
采用层次树结构的命名方法,
任何一个连接到因特网的主机或路由器,都有一个唯一的层次结构名称,即域名(Domain Name),其中域是名字空间中一个可被管理的划分,每个域名都有标号序列组成,标号之间用点 “.” 隔开。
每个域由不同的组织进行管理,每个组织都可以将它的域再分成一定数目的子域,并将这些子域委托给其他组织去管理
tips
- 标号中的英文不区分大小写
- 标号中除连字符(_)外不能使用其他的标点符号
- 每个标号不能超过 63 个字符,完整域名不超过 255个字符
- 低级域名在左边,顶级域名在最右边
顶级域名(Top Level Domain, TLD)
国家顶级域名(nTLD)
通用顶级域名(gTLD)
.com-公司;.net-网络服务机构;.org-非营利性组织;.gov-美国政府部门
基础结构域名,仅一个,即arpa, 用于反向域名解析,又称反向域名
域名服务器
Intro
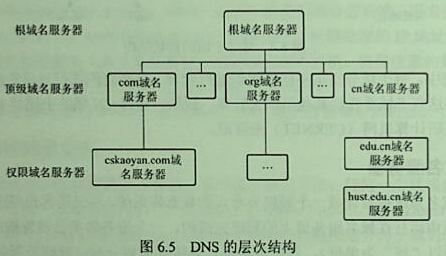
- 因特网的域名系统被设计成一个联机分布式的数据库系统,
4 种类型的域名服务器
根域名服务器
- 最高层次的域名服务器,知道所有的顶级域名服务器的 IP 地址
- 有 13 个根域名服务器(冗余服务器的集群),
- 用来管管辖顶级域,通常并不直接把待查询的域名直接转换成 IP 地址,而是告诉本地域名服务器下一步应当找哪个顶级域名服务器进行查询
顶级域名服务器
- 负责管理在该顶级域名服务器注册的所有二级域名
- 应答可能是最后结果,也可能是下一步应当查找的域名服务器的 IP 地址
授权域名服务器(权限域名服务器)
- 每台主机都必须在授权域名服务器处登记
- 许多域名服务器都同时充当本地域名服务器和授权域名服务器
- 授权域名服务器总能将其管辖的主机名转换为该主机的 IP 地址
本地域名服务器
- 本地域名服务器对域名系统非常重要
- Windows配置本地连接时,就需要填写DNS地址,即本地DNS
域名解析过程
Intro
- 正向解析,把域名映射称为 IP 地址
- 反向解析,把 IP 地址映射称为域名
- 为了提高 DNS 查询效率,在域名服务器中广泛地使用了高速缓存。
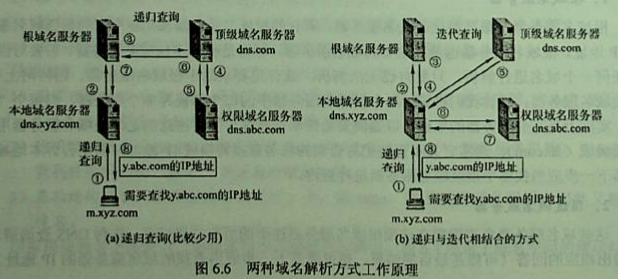
两种方式
递归查询,会造成根域名服务器负载过大,几乎不用
递归和迭代相结合的查询
文件传输协议(FTP)
FTP 的工作原理
- 文件传输协议(File Transfer Protocol, FTP)
- C/S 工作方式, TCP
- 端口 21
控制连接(端口 21)与数据连接(端口 20)
电子邮件
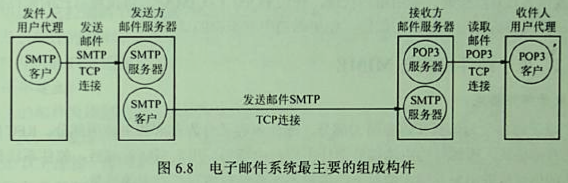
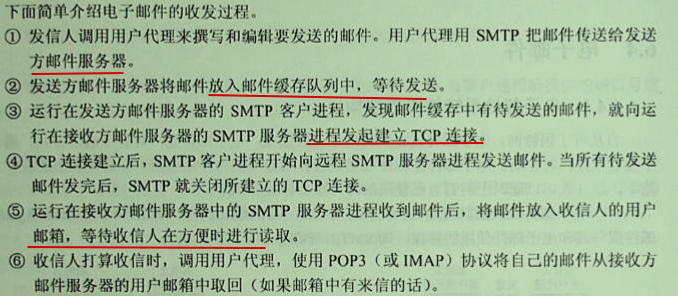
电子邮件系统的组成结构
电子邮件格式与MIME
- 电子邮件格式
- 一个电子邮件分为信封和内容两大部分,邮件内容又分为首部和主体,主体由用户自由撰写。
- 邮件系统会自动地将信封所需的信息提取出来并写在信封上。
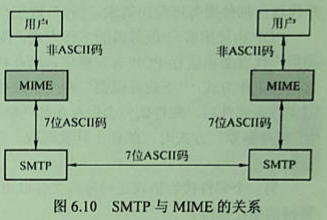
- 多用途网际邮件扩充(Multipurpose Internet Mail Extensions, MIME)
- 增加邮件主体的结构,并定义了传送非 ASCII码的编码规则
SMTP 和 POP3
- 简单邮件传输协议(Simple Mail Transfer Protocol, SMTP)
- C/S | TCP 连接 | 端口 25
- 1.连接建立 2.邮件传送 3.连接释放
- 邮局协议(Post Office Protocol,POP3)
- C/S | TCP 连接 | 端口 110
- 两种规则方式
- 网际报文存取协议(IMAP)
万维网(WWW)
WWW的概念与组成结构
万维网(World Wide Web, WWW)是一个资料空间
超文本标记语言(HyperText Markup Language, HTML)
万维网的内核部分是由三个标准构成的
统一资源定位符(URL)
HTTP,应用层协议,TCP
HTML,一种文档结构的标记语言
万维网是无数个网络站点和网页的集合
超文本传输协议(HTTP)
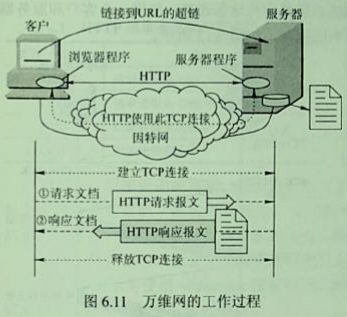
Intro
- HTTP定义了浏览器怎样向万维网服务器请求万维网文档,以及服务器怎样把文档传送给浏览器
- 是面向事务(Transaction-oriented)的协议,规定了浏览器和服务器之间的请求和响应的格式与规则,是万维网能够可靠交换文件的重要基础
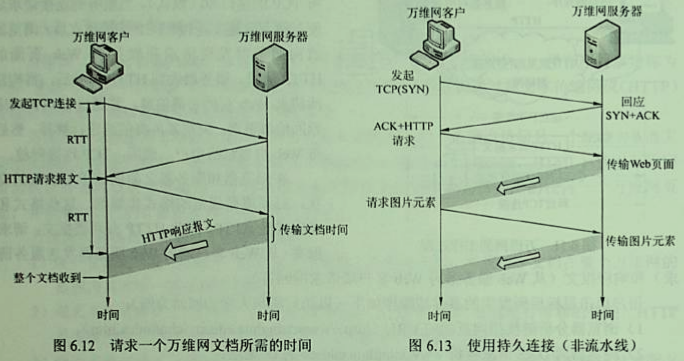
HTTP 的操作过程
HTTP 的特点
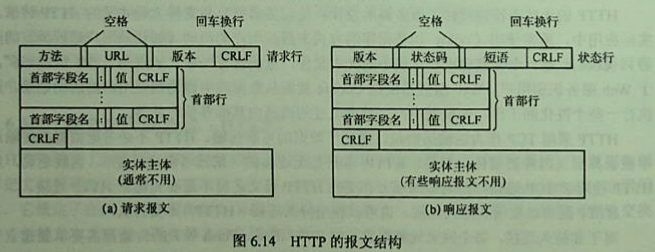
HTTP的报文结构
- HTTP是面向文本的(Text-Oriented),因此报文中的每个字段都是一些 ASCII码串。
- 请求报文
- 相应报文

855
Reference

Examination Syllabus
基础级
中文题目只涉及初级编程分5个段位
青铜
理解并掌握简单数据类型及表达式、程序的顺序执行结构和简单分支结构。具备使用一门编程语言进行简单的计算、基本的格式化输入输出以及解决简单分支问题的能力。
白银
在达到青铜段位要求的基础上,理解并掌握程序的循环结构。具备编程解决复杂嵌套分支和嵌套循环问题的能力。
黄金
在达到白银段位要求的基础上, 理解并掌握数组(包括高维数组和字符串)和结构体等概念,具备编程解决相关问题的能力。
白金
在达到黄金段位要求的基础上,理解并掌握函数和递归的概念,具备使用函数和递归解决较为复杂的综合性问题的能力,并掌握一定的调试技巧。
钻石
在达到白金段位要求的基础上,掌握简单排序、二分查找算法,具备解决较为复杂的综合性问题的能力,能够编写并调试代码量超过50行的程序。
乙级
中文题目只涉及基础编程最难到排序算法
考生应具备以下基本能力:
1. 基本的C/C++的代码设计能力,以及相关开发环境的基本调试技巧;
2. 理解并掌握最基本的数据存储结构,即:数组、链表;
3. 理解并熟练编程实现与基本数据结构相关的基础算法,包括递归、排序、查找等;
4. 能够分析算法的时间复杂度、空间复杂度和算法稳定性;
5. 具备问题抽象和建模的初步能力,并能够用所学方法解决实际问题。
甲级
英文题目涉及基础数据结构
在达到乙级要求的基础上,还要求:
1. 具有充分的英文阅读理解能力;
2. 理解并掌握基础数据结构,包括:线性表、树、图;
3. 理解并熟练编程实现经典高级算法,包括哈希映射、并查集、最短路径、拓扑排序、关键路径、贪心、深度优先搜索、广度优先搜索、回溯剪枝等;
4. 具备较强的问题抽象和建模能力,能实现对复杂实际问题的模拟求解。
- 顶级
国际竞赛水平相当涉及高级数据结构与经典算法的应用
在达到甲级要求的基础上,还要求:
1. 对高级、复杂数据结构掌握其用法并能够熟练使用,如后缀数组、树状数组、线段树、Treap、静态KDTree等;
2. 能够利用经典算法思想解决较难的算法问题,如动态规划、计算几何、图论高级应用(包括最大流/最小割,强连通分支、最近公共祖先、最小生成树、欧拉序列)等,并灵活运用;
3. 能够解决复杂的模拟问题,编写并调试代码量较大的程序;
4. 具有缜密的科学思维,考虑问题周全,能够正确应对复杂问题的边界情况。
PAT
PAT准备,希望甲级高分,该如何高效地准备?如何算是真正有效地刷题?
《算法导论》
学会C++
数据结构我大概学了这几块:
线性结构:数组,栈,队列看一下就过了;链表自己实现了一遍;常见排序理解并会写。
树:二叉搜索树熟练(尤其是各种遍历);AVL树和红黑树尽力理解了一下,我是真的记不住……
图:BFS, DFS, 最短路(dijkstra, spfa, floyd)。这里的题目最常见,要能写得很灵活。
其它:堆,背包问题(良心教程https://github.com/tianyicui/pack/blob/master/V2.pdf),贪心问题, KMP(还没遇到过题目)。
Reference